
Laboratoire scientifique de Mars
| Laboratoire scientifique de Mars | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Phase : E / Statut : actif | ||||||||||||||||||||||
 Autoportrait du Rover Curiosity | ||||||||||||||||||||||
| Taper: | rover martien | |||||||||||||||||||||
| Pays: |
|
|||||||||||||||||||||
| Organisation: |
|
|||||||||||||||||||||
| Désignation COSPAR : | 2011-070A | |||||||||||||||||||||
| NORAD / SCN-ID : | 37936 | |||||||||||||||||||||
| Dates des missions | ||||||||||||||||||||||
| Date de début: | 26/11/2011 15h02 UTC | |||||||||||||||||||||
| Lieu de départ : | Cap Canaveral , LC-41 | |||||||||||||||||||||
| Lanceur: | Atlas V (541) (AV-028) | |||||||||||||||||||||
| Durée des missions : | Mission principale : 669 sols de Mars (687 jours terrestres) Actuel : 3229 sols (3318 jours terrestres) |
|||||||||||||||||||||
| Lieu d'atterrissage : | " Bradbury Landing " dans le cratère Gale 4 ° 35 '22 " S , 137 ° 26' 30 " O |
|||||||||||||||||||||
| divers | ||||||||||||||||||||||
| ||||||||||||||||||||||



Mars Science Laboratory ( MSL en abrégé ) est une mission de la NASA dans le cadre du programme phare qui étudie Mars en ce qui concerne son adéquation actuelle et passée en tant que biosphère . A cet effet, un rover largement autonome du nom de Curiosity (en anglais pour 'curiosity'), qui est équipé de dix instruments pour examiner la roche, l' atmosphère et le rayonnement , a été placé à la surface . En plus d'un grand nombre de spectrographes différents , des caméras et des instruments météorologiques sont utilisés pour les analyser, qui envoient les données de mesure à la terre pour évaluation. Avec une masse de 900 kg et la taille d'une petite voiture compacte , Curiosity était l'objet artificiel le plus lourd à la surface de Mars jusqu'à l'atterrissage de Persévérance en février 2021 et a remplacé les sondes filles Viking , pesant chacune près de 600 kg.
La technologie a été développée sur la base de l'expérience avec les deux rovers d'exploration de Mars et a beaucoup plus de puissance dans tous les domaines. De plus, certaines innovations ont été intégrées, notamment dans le domaine de son système d'atterrissage ( atterrissage doux et ciblé au lieu d'un atterrissage imprécis avec impact airbag ). De plus, Curiosity a reçu des batteries de radionucléides au lieu de cellules solaires dépendantes des conditions météorologiques pour son approvisionnement en énergie .
Le 26 novembre 2011, la sonde a été lancée à bord d'un Atlas V (541) depuis la base aérienne de Cap Canaveral ; l'atterrissage sur Mars a été confirmé le 6 août 2012. Peu de temps après l'atterrissage a commencé Curiosity , les premières images à envoyer à la Terre et fonctionne depuis 3229 sol .
préhistoire
.jpg)
La mission a été d' abord mentionné en 2003 dans un document intitulé « Nouvelles frontières du système solaire: une stratégie d' exploration intégrée » , publié par la National Academies , avec des coûts allant de $ 325000000 à 650000000 $ . En avril 2004, la NASA a lancé un appel à la communauté scientifique pour qu'elle soumette des idées et des concepts pour les instruments scientifiques du Mars Science Laboratory. En fin d'année, Aerojet a testé un ancien moteur de réserve du programme Viking pour obtenir les premières données pour la conception d'une version améliorée pour l' étage de descente . Peu de temps après, huit concepts ont été sélectionnés parmi les réponses à l'appel du printemps pour l'intégration et le développement ultérieur. En mai 2006, le premier atelier visant à déterminer le lieu d'atterrissage du rover a eu lieu. Le projet a ensuite passé le Preliminary Design Review , qui a abouti au déblocage de 1,63 milliard de dollars pour le développement, et en juin 2007, il a réussi le Critical Design Review final.
En novembre 2008, la plupart du développement et de l'intégration des systèmes étaient presque terminés et les tests ont commencé. Peu de temps après, cependant, il est devenu clair que la date de début initiale en octobre 2009 ne pouvait plus être respectée, c'est pourquoi elle a été reportée à la fin de 2011. La raison en était des problèmes techniques qui n'ont pas pu être résolus assez rapidement pour pouvoir terminer tous les tests programmés à temps. Les actionneurs , qui ont dû être repensés en grande partie, ont été particulièrement touchés . Ce retard a ajouté 400 millions de dollars supplémentaires aux coûts de mission pour un total de 2,2 milliards de dollars, ce nombre atteignant 2,5 milliards de dollars au lancement.
Enfin, le 27 mai 2009, le nom officiel du rover de la mission a été annoncé : Curiosity . Auparavant, un concours public de nomination avait été annoncé, que la sixième année Clara Ma a remporté avec cette suggestion de nom et un court essai sur sa signification. Le 22 juin 2011, le Mars Science Laboratory a quitté après les derniers tests, les ateliers du JPL en Californie et était un C-17 de l' US Air Force vers le Kennedy Space Center où ont volé les derniers préparatifs du lancement et de l'intégration avec l'Atlas. -V lanceur a eu lieu.
Le 22 juillet 2011, après plus de cinq ans de recherches, il a été annoncé que le cratère Gale avait été choisi comme site d'atterrissage.
Objectifs de la mission
.jpg)

L'objectif général de Curiosity est de déterminer si Mars était actuellement ou dans le passé capable d'héberger la vie.
Huit tâches scientifiques spécifiques en découlent :
- Enregistrement de la composition et de la quantité de composés organiques carbonés
- Mesure quantitative des éléments de base de la vie ( hydrogène , azote , oxygène , carbone , phosphore et soufre )
- Rechercher des structures qui indiquent des processus biologiques
- Etude de la surface de Mars au regard de sa composition minéralogique , chimique et isotopique
- Recherche sur les processus qui ont créé et influencé le sol et les roches
- Détermination de la répartition actuelle et de l'état de l'eau et du dioxyde de carbone
- Analyse de l'évolution de l'atmosphère sur une période de 4 milliards d'années
- Détection du niveau et du spectre de rayonnement à la surface de Mars
D'un point de vue technologique, trois autres objectifs sont à atteindre :
- Démonstration de locomotion à longue distance (5-20 km) sur Mars
- Atterrissage de précision dans un cercle cible de 20 km de diamètre
- Validation de la possibilité d'atterrir un rover lourd et de grande taille sur Mars (important pour une mission ultérieure de retour d'échantillons sur Mars )
Présentation technique Mars Science Laboratory
construction
Le dessin suivant illustre la structure du Mars Science Laboratory et donne un bref aperçu des fonctions des composants individuels.
Module croisière |
 |
Ce module contrôlait le Mars Science Laboratory pendant le vol Terre-Mars. Il contenait également des pièces pour la communication et le contrôle de la température. Avant d'entrer dans l'atmosphère martienne, le module a été séparé de la capsule. |
| capsule |  |
La capsule contenait l'étage de descente. Il les a protégés ainsi que le rover des influences de l'espace ouvert et des contraintes causées par l'entrée dans l'atmosphère martienne. Au sommet se trouvait un conteneur pour le parachute, ce qui ralentissait la descente de la capsule. Diverses antennes de communication étaient également fixées au support de parachute. |
| Niveau de relégation |  |
Une fois que le bouclier thermique et la capsule ont fait leur travail, ils ont été séparés et ont libéré l'étage de descente. Cela a permis au rover d'atterrir en douceur et avec précision sur la surface de Mars, ce qui a été réalisé grâce à l'utilisation de radars et de moteurs de contrôle individuels. De plus, la scène comprenait des composants importants pour la communication pendant le vol de croisière, ainsi que le SkyCrane. La marche de descente planait à quelques mètres au-dessus de la surface. Avec le SkyCrane, le rover a ensuite été abaissé les derniers mètres sur des cordes et a doucement touché la surface de Mars. |
| Rover Curiosité |  |
Le rover, nommé Curiosity, est la pièce maîtresse de la mission et transporte tous les instruments scientifiques et les systèmes de communication importants. Pour gagner de la place, le train de roulement a été replié pendant le transport. |
| Bouclier thermique |  |
Le bouclier thermique protégeait les autres composants des températures extrêmement élevées lors de l'entrée dans l'atmosphère martienne. |
| Système global |  |
Assemblé, la construction prête à voler de 3,4 tonnes a abouti comme indiqué sur la photo. L'étage de descente et le rover se trouvaient à l'intérieur de la capsule, sur laquelle était monté le module de vol de croisière. |
Système de communication
L'illustration suivante donne un aperçu du système de communication du Mars Science Laboratory.


Technologie des systèmes de vol de croisière et d'atterrissage
Module croisière

Le Mars Science Laboratory était contrôlé par le module de vol de croisière monté sur la capsule lors de son voyage de la Terre à Mars . Le module était en forme d'anneau avec un diamètre de quatre mètres et avait une masse de 600 kg, carburant compris. Il était en aluminium et était stabilisé par plusieurs entretoises . Douze cellules solaires individuelles pour l'alimentation en énergie ont été fixées à la surface de l'anneau , qui, avec un rendement de 28,5%, ont été conçues pour produire au moins 1 kW d' énergie électrique à la fin de la mission (peu avant que la capsule n'entre dans le martien atmosphère) . Afin de pouvoir mobiliser suffisamment d'énergie pour des opérations très énergivores, plusieurs batteries lithium-ion étaient également disponibles. De plus, le module était connecté aux batteries de l'étage de descente et au système d'alimentation de Curiosity , de sorte qu'il y avait la possibilité de réorganiser l'alimentation en cas de problèmes en vol.
Pendant la croisière, le MSL a été stabilisé en vrille à une vitesse de 2 min -1 autour de l'axe de symétrie. Un capteur d'étoiles et l'un des deux capteurs solaires ont été utilisés pour déterminer la position dans l'espace . Le premier a observé plusieurs étoiles guides sélectionnées dynamiquement , le capteur solaire n'utilisait le soleil que comme point de référence. Le système a été conçu de manière redondante afin que la sécurité de la mission puisse être augmentée. Pour contrôler la stabilisation de la vrille et pour effectuer des manœuvres de trajectoire, huit propulseurs alimentés en hydrazine ont été actionnés -fuel. Celui-ci était situé dans deux réservoirs sphériques en titane .
Étant donné que le radionucléide de Curiosity résistant a donné de grandes quantités de chaleur (voir alimentation électrique ), il fallait l'éliminer de l'intérieur de la capsule, afin d'éviter la surchauffe. Par conséquent, le module de vol de croisière avait un total de dix radiateurs , qui rayonnaient la chaleur dans l'espace. Il s'agissait de simples surfaces métalliques clairement visibles sur les côtés du module. À l'aide d'un pipeline complexe et d'une pompe, ils ont formé un circuit de refroidissement avec la batterie de radionucléides du rover. Certains composants (par exemple les piles et les accumulateurs) ont été spécifiquement chauffés de cette manière afin de pouvoir être protégés des dommages causés par le froid. Plusieurs capteurs de température ont assuré le réglage automatique du système de refroidissement et de chauffage.
Bien que le module de vol de croisière lui-même ne contienne pas ses propres systèmes de communication, il disposait de "l'antenne à gain moyen" (MGA), qui pouvait être connectée au complexe émetteur/récepteur de l' étage de descente via des commutateurs. Une grande partie de la communication a été assurée via cette antenne cornet pendant le vol de croisière et la première phase d'atterrissage. Étant donné que le MGA avait un effet directionnel moyen-fort , il devait être au moins grossièrement aligné avec la terre afin d'obtenir une bonne qualité de connexion. En retour, cette fonctionnalité offrait un débit de données plus élevé avec la même puissance de transmission par rapport aux antennes omnidirectionnelles simples telles que. B. la PLGA . Avec un alignement optimal, le gain de l' antenne était d' environ 18 décibels , avec des signaux polarisés à gauche ou à droite transmis. La transmission a eu lieu à 8401 MHz avec un débit de données allant jusqu'à 10 kBit/s, la réception a eu lieu à environ 1,1 kBit/s à 7151 MHz.
capsule



La capsule de 731 kg, fabriquée par Lockheed Martin , protégeait le parachute, l'étage de descente et le Rover Curiosity des influences de l'espace ouvert et des conditions difficiles lors de l'entrée dans l'atmosphère martienne. La structure a été conçue comme un noyau en nid d'abeille , dans lequel deux plaques en PRFC étaient soutenues par un noyau en nid d'abeille en aluminium. Sur la surface était un mince bouclier thermique ablatif constitué d'un bouchon en forme , à base de silicium composé. Il s'agissait de la dernière version d'une famille de matériaux dont les racines remontent aux sondes Viking et qui ont été récemment utilisées dans les missions Stardust et Genesis .
Afin de pouvoir effectuer des manœuvres de contrôle dans l'espace et lors de l'entrée dans l'atmosphère martienne, la capsule disposait de huit petits propulseurs (disposés par paires) et de huit lests en tungstène, pesant chacun 25 kg . Pendant le vol de croisière, les poids en tungstène ont assuré que l'axe de rotation et l'axe de symétrie correspondaient. Lors de l'entrée, ils ont été éjectés pour changer le centre de gravité, ce qui a affecté à son tour l' angle d'attaque . Les moteurs, qui pouvaient développer une poussée allant jusqu'à 267 Newtons, n'étaient utilisés que pour contrôler la rotation et l'alignement, ils n'étaient pas utilisés pour le freinage.
Sur la partie supérieure de la capsule se trouvait le conteneur du parachute , avec lequel la capsule a été encore décélérée dans la partie inférieure de l'atmosphère. Plusieurs antennes de communication étaient fixées au support. Le parachute mesurait environ 16 m de diamètre et atteignait une longueur de plus de 50 m avec ses 80 cordes d'attache. Le parachute a été conçu pour être utilisé en cas de chute en dessous de la limite de Mach 2 et d'une force de freinage allant jusqu'à 289 kN.
La partie la plus basse de la capsule était formée par un bouclier thermique ablatif qui protégeait tous les autres composants des très hautes températures (jusqu'à 2000°C) lors de l'entrée dans l'atmosphère martienne. Avec un diamètre de 4,57 m, il était à ce jour le plus grand bouclier thermique jamais construit pour une mission de recherche. Les tuiles sur le bouclier étaient faites d'un matériau relativement nouveau appelé l'ablateur de carbone imprégné phénolique (PICA), qui jusqu'à présent n'a été utilisé que pour la mission Stardust. Il est basé sur un composé carbone - phénol , qui présente un rapport particulièrement bon entre l'effet protecteur et la masse. Le bouclier a été conçu pour une charge thermique de 216 W/cm², un cisaillement allant jusqu'à 540 Pa et une pression dynamique pendant le vol dans l'atmosphère d'environ 37 kPa.
Le bouclier thermique contenait également sept jauges de pression et de température. Ceux-ci doivent enregistrer les charges sur le blindage lors de l'entrée avec un degré élevé de précision. Les données sont d'une grande importance pour les concepteurs, car les boucliers sont actuellement conçus en fonction des résultats de simulations. Cependant, ceux-ci sont optimisés pour l'atmosphère terrestre et non pour celle de Mars, qui est plus de cent fois plus mince et est constituée à 95 % de dioxyde de carbone. Par conséquent, de grandes marges de sécurité ont été ajoutées aux résultats de simulation afin de sécuriser la mission, qui a cependant consommé des quantités considérables de masse de charge utile. Les nouvelles données de l'entrée MSL devraient éliminer ces surtaxes ou au moins les réduire considérablement afin que la charge utile scientifique des futures missions sur Mars puisse être augmentée.
Comme le module de vol de croisière, la capsule ne contenait pas son propre système de communication, mais disposait de trois antennes dans la zone du support de parachute. Dans la bande X, il y avait deux modèles identiques, le "Parachute Low-Gain Antenna" (PLGA) et le "Tilted Low Gain Antenna" (TLGA), qui étaient responsables d'une partie de la communication pendant le vol de croisière. Les deux ne différaient que par leur position sur la structure, de sorte qu'ils étaient disposés de manière à pouvoir remplir les angles morts de l'autre antenne. La directivité de la construction était très faible, de sorte qu'aucun alignement précis n'était nécessaire, ce qui nécessitait cependant un faible débit de données. Le gain de l'antenne a fluctué entre 1 et 5 dB, car la monture en parachute a provoqué des effets de réflexion considérables. Au début de la mission (près de la Terre), les données pouvaient encore être reçues à 1,1 kBit/s et envoyées à 11 kBit/s, mais avec l'augmentation de la distance le débit de données tombait continuellement à quelques dizaines de bit/s.
Lors de la première phase d'atterrissage, la communication UHF a eu lieu via la "Parachute UHF Antenna" (PUHF). Cela impliquait un agencement d'un total de huit petites antennes patch , qui étaient fixées tout autour du revêtement extérieur du support de parachute. Il en a résulté un comportement d'émission et de réception omnidirectionnel très stable par rapport au PLGA et au TLGA, de sorte que les données pouvaient être transmises à une vitesse suffisante même dans des situations de vol extrêmes. Cette construction a déjà été testée avec succès sur l'atterrisseur martien Phoenix . Le gain de l'antenne était compris entre -5 et +5 dB, avec un débit d'au moins 8 kBit/s.
Niveau de relégation
La nouvelle décélération après la séparation du parachute à environ 1 800 m au-dessus du sol a été effectuée par les huit moteurs de l'étage de descente, chacun étant monté par paires. La conception était basée sur les moteurs de freinage du Viking Lander, les matériaux et les systèmes de contrôle utilisés étant adaptés à l'état actuel de l'art. Chaque moteur était capable de générer de 0,4 à 3,1 kN de poussée et atteignait une impulsion spécifique allant jusqu'à 221 s. Un fonctionnement à très faible puissance était également possible (1% du débit de carburant possible) afin de réchauffer les moteurs et leur réponse. comportement à améliorer. La consommation de carburant était en moyenne d'environ 4 kg par seconde, avec une réserve de 390 kg. Deux batteries thermiques Li-FeS 2 ont été utilisées pour alimenter la scène en énergie .
Afin de calculer correctement le taux de descente et la distance au sol, l'étage de descente avait son propre système radar , qui était monté sur une flèche séparée et s'appelait le "Terminal Descent Sensor" (TDS). Il a déterminé ces paramètres à partir d'une hauteur de 4 km et d'une vitesse inférieure à 200 m/s. A cet effet, le signal radiogoniométrique de 12 W envoyé dans la bande Ka (36 GHz) a été émis via six petites antennes, chacune avec un angle d'ouverture de 3°. Cette disposition a permis au système de navigation de calculer avec précision le mouvement dans les trois axes, ce qui était essentiel pour l'utilisation du SkyCrane. Le système pesait 25 kg et nécessitait 120 W de puissance électrique en fonctionnement actif.


La partie la plus notable de l'étape de descente d'environ 2,4 tonnes était le soi-disant complexe SkyCrane. Celui-ci a été activé à environ 20 mètres au-dessus de la surface de Mars et a abaissé Curiosity sur plusieurs cordes de huit mètres de long comme une grue de construction . Par rapport à la méthode de l' airbag par ailleurs courante , ce nouveau procédé a permis au rover lourd d'atterrir en toute sécurité même sur un terrain défavorable et a considérablement réduit les exigences de résistance aux chocs (vitesse de descente : 0,75 m/s au lieu d'environ 12 m/s pour le MER rovers soit environ 29 m/s pour Beagle 2 ). L'énergie d'impact était si faible que le train d'atterrissage pouvait l'absorber complètement, ce qui signifiait qu'aucun dispositif d'atterrissage supplémentaire n'était nécessaire, tels que des jambes absorbant les chocs spéciales , telles que celles utilisées sur les atterrisseurs Viking. Le toucher du rover a été enregistré par des capteurs de force , car la tension sur les cordes diminue considérablement lorsqu'il touche le sol. Ces mesures ont également permis de déterminer si la Curiosity a touché le sol en biais ou en ligne droite. Une fois que le rover était en sécurité à la surface de Mars, les cordes ont été coupées pyrotechniquement , et l'étape de descente a de nouveau augmenté la puissance du moteur afin de faire un crash à un peu plus de cent mètres de Curiosity . Le processus de dépose du rover a duré 13 secondes au total.
L'étage de descente, avec le rover lui-même, était la seule partie qui avait son propre système de communication. Concrètement, un émetteur baptisé « Small Deep Space Transponder » (SDST) était disponible sur scène dans la zone de la bande X. Il s'agissait d'un développement ultérieur de la version déjà utilisée sur les Mars Exploration Rovers . Les deux principales améliorations étaient une stabilité accrue du signal en cas de fluctuations de température et un effet de fuite nettement plus faible . Le SDST était responsable de la communication pendant tout le vol de croisière et la phase d'atterrissage. Il existe un modèle identique dans le rover, mais il n'est devenu actif qu'après l'atterrissage. Les signaux pouvaient être reçus jusqu'à un seuil de -70 dBm, la bande passante était conçue pour 20 à 120 Hertz , en fonction de la puissance et du réglage du signal . Le débit de données pourrait être réglé automatiquement entre 8 et 4000 bits par seconde par l'électronique, en fonction de la qualité du signal. Le système pesait 3 kg et nécessitait jusqu'à 15 W de puissance.
Étant donné que les signaux du SDST étaient trop faibles pour envoyer des données, ils ont d'abord été amplifiés par ce que l'on appelle « l'amplificateur à tube à ondes de voyage » (TWTA). L'élément central était un tube à ondes progressives , dont la conception était une modification de l' amplificateur MRO . Le TWTA nécessitait jusqu'à 175 W de puissance électrique et avait une puissance de transmission allant jusqu'à 105 W. Le système était protégé contre les dommages causés par les sous-tensions et les surtensions et pesait 2,5 kg.
Dans la phase finale de l'atterrissage, après séparation de la capsule, la « Descent Low Gain Antenna » (DLGA) a assuré une connexion avec la station au sol sur terre. Cependant, il s'agissait plus d'un guide d' ondes ouvert que d'une antenne spéciale. C'était nécessaire car c'était aussi le connecteur de signal entre la marche de descente et les antennes des marches supérieures. L'antenne se comportait ainsi comme un guide d'onde normal jusqu'à ce qu'elle soit séparée de la capsule et que l'extrémité soit exposée. Le gain de l'antenne pouvait fluctuer entre -5 et +8 dB car, selon la situation de vol, il y avait de nombreuses réflexions et interférences sur les parties proches de l'appareil. La masse de "l'antenne" était de 0,45 kg.
Après avoir séparé la capsule, le système de communication UHF a perdu le contact avec l' antenne PUHF , de sorte que la « Descente UHF Antenna » (DUHF) a ensuite été utilisée afin que la connexion de données puisse être maintenue dans cette bande de fréquence. Le gain de l'antenne était extrêmement volatile en raison des réflexions et des interférences de la sonde , fluctuant entre -15 et +15 dB.
Technologie du Rover Curiosity
Par rapport aux rovers martiens précédents

| Curiosité | REM | Séjournant | |
|---|---|---|---|
| Année de début | 2011 | 2003 | 1996 |
| Masse (kg) | 900 | 174 | 10.6 |
| Dimensions (mètre, L × l × H) | 3,1 x 2,7 x 2,1 | 1,6x2,3x1,5 | 0,7 x 0,5 x 0,3 |
| Production d'énergie ( kWh / Sol ) | 2.9 | 0,3-0,9 | 0,1 max. |
| Instruments scientifiques | dix | 5 | 4e |
| Vitesse max (cm/s) | 4e | 5 | 1 |
| Données (Mo / jour) | 19-31 | 6-25 | 3,5 max. |
| Puissance de calcul ( MIPS ) | 400 | 20e | 0,1 |
| RAM (Mo) | 256 | 128 | 0,5 |
source de courant

Contrairement aux missions de rover précédentes sur Mars, Curiosity est alimenté par une batterie de radionucléides , connue sous le nom de « générateur thermoélectrique radio-isotope multi-missions » (MMRTG), au lieu des cellules solaires habituelles . Cette solution est indépendante de la météo, offre un environnement thermique stable pour les systèmes du rover et assure une plus grande mobilité. De plus, la construction est plus légère qu'un panneau solaire avec les mêmes performances, de sorte qu'il reste plus d'espace pour les instruments scientifiques. La batterie de 43 kg contient 4,8 kg de plutonium obtenu par la désintégration α du plutonium contenu - l' isotope 238 Pu ( demi-vie de 87,7 ans) initialement 2000 W dégage des performances thermiques. Cette chaleur est au moyen de thermocouples Te Sb Ge Ag - et Pb Te - convertis en une puissance électrique de 110 W, ce qui correspond à un rendement d'environ 6%. L'approvisionnement en énergie est conçu pour plus de sept fois le temps de la mission principale. La tension continue générée est de 28 V, ce qui correspond également à la tension du système électrique du véhicule. Une partie de la chaleur générée est également utilisée pour maintenir l'intérieur du rover à une température de fonctionnement optimale. Les thermocouples dégageant de grandes quantités de chaleur en continu depuis leur fabrication, le MMRTG n'a été attaché au système porteur prévu à cet effet sur la poupe du Curiosity que quelques jours avant le départ . À ce moment-là, le rover était déjà à l'intérieur de la capsule et sur la fusée Atlas V, le déploiement devait donc avoir lieu dans la Vertical Integration Facility (VIF).

De Boeing construction -Conçu est basée sur l'extérieur de la SNAP-19 batterie même à Pioneer 10 / 11 et Viking 1. / 2 a été utilisé avec succès. À l'intérieur, cependant, huit capsules de « source de chaleur à usage général » (GPHS) sont utilisées, qui contiennent toutes les matières radioactives et fournissent la chaleur requise. Ceux-ci sont également considérés comme éprouvés, car ils ont déjà été utilisés avec les sondes Cassini-Huygens , Galileo , Ulysse et New Horizons .
Le plutonium contenu étant hautement radioactif et toxique, un concept de sécurité à plusieurs niveaux a été mis en œuvre pour empêcher sa libération en cas de faux démarrage de la fusée. Lorsqu'elle est soumise à des contraintes mécaniques, la céramique de dioxyde de plutonium ne se décompose pas en fines poussières, mais plutôt en fragments plus gros, qui empêchent l'absorption des radionucléides dans les poumons par la respiration . De plus, le matériau peut résister à la chaleur lors de la rentrée sans s'évaporer et réagit difficilement chimiquement avec d'autres substances telles que l'air ou l'eau. À l'intérieur de la batterie, la céramique de plutonium est logée dans huit capsules individuelles, chacune avec son propre bouclier thermique et son boîtier résistant aux chocs. A l'intérieur de ces capsules, la céramique est entourée de plusieurs couches de matériaux différents (dont l' iridium et le graphite ) qui, grâce à leur point de fusion élevé et leur haute résistance à la corrosion , devraient empêcher les substances radioactives de s'échapper après un impact.
La NASA a donné la probabilité d'un accident avec dégagement de radioactivité à 0,4%. Dans ce cas, cependant, l'exposition individuelle à la radioactivité dans la zone de départ ne devrait être que de 0,05 à 0,10 millisievert (correspond à peu près à un examen radiographique de la mâchoire). Dans les précédents faux départs avec des batteries de radionucléides américaines protégées ( ALSEP et Nimbus B1 ), cependant, les mesures de protection se sont avérées si fiables qu'aucune radioactivité n'a pu être détectée du tout.
Néanmoins, ce concept d'approvisionnement énergétique a fait l'objet de critiques, une distribution de 238 Pu en cas de faux départ n'étant pas à exclure.
Afin de pouvoir faire fonctionner plusieurs systèmes énergivores, comme l' instrument SAM , en parallèle pendant une courte période de temps, Curiosity dispose de deux batteries lithium-ion supplémentaires . Ceux-ci ont une capacité de 42 ampères-heures chacun , délivrent une tension de sortie de 28 V et sont conçus pour plusieurs cycles de charge par jour martien .
électronique
Le traitement des données du rover s'effectue dans le « Rover Compute Element » (RCE), dont une unité de réserve identique est disponible. La partie centrale de RCE est un RAD750 - processeur de BAE Systems , une fréquence d'horloge ayant de 200 MHz et environ 400 millions d' instructions par seconde poignée de la boîte. Le processeur, qui se trouve dans un boîtier CCGA , est spécifié pour une dose totale de rayonnement d'un Mrad et peut fonctionner dans une plage de température très large (-55 °C à 125 °C). De plus, sa structure ayant une largeur comprenant de 150 nm contre le verrouillage immunitaire. Une mémoire principale d'une taille de 256 Mo, une mémoire flash de 2 Go et une EPROM de 256 Ko sont disponibles pour le stockage des données, toutes les pièces étant conçues pour être tolérantes aux pannes et aux radiations. Le système d'exploitation utilisé est VxWorks , qui gère plus de 130 threads . Au total, 2,5 millions de lignes de code C ont été écrites pour le logiciel de la mission.
la communication
Pour une vue d'ensemble illustrée, voir également la section Vue d'ensemble du système de communication
Pour communiquer avec la station au sol sur terre, Curiosity dispose de deux complexes de communication. L'un travaille dans la bande UHF (0,4 GHz) et est responsable de la réception des commandes de contrôle et de l'envoi des données d'état, l'autre complexe fonctionne dans la bande X (7-8 GHz) et assure la transmission des données scientifiques à un débit élevé Volume de données ( jusqu'à 250 Mbit par jour) pendant la mission principale. Dans la phase de vol de croisière, il complétait le système de bande X dans son rôle. C'est également le cas s'il n'y a pas de ligne de vue directe vers la terre ou si le rover est en mode sans échec en raison d'une défaillance du système.

Le système UHF dispose de deux émetteurs redondants, appelés "Electra Lite Transponders" (ELT), qui contiennent tous les composants permettant de traiter et de générer des signaux radio (amplificateur, oscillateur , transpondeur, etc.). Il s'agit d'une variante plus légère et moins puissante du système qui était déjà utilisé dans le Mars Reconnaissance Orbiter . Le débit de données lors de l'envoi, qui est automatiquement sélectionné par l'électronique en fonction de la qualité du signal, est jusqu'à 2 Mbit/s, lors de la réception jusqu'à 256 kBit/s. Chaque émetteur pèse 3 kg et nécessite jusqu'à 96 W de puissance électrique.
La "Rover UHF Antenna" (RUHF) est la principale antenne de Curiosity pour transmettre des données scientifiques à la station au sol sur terre. Le système de communication UHF du Mars Reconnaissance Orbiter sert de station relais . Celui-ci reçoit les signaux de Curiosity , les traite puis les transmet aux antennes du Deep Space Network sur terre via un système de transmission performant en bande X. Si Mars Reconnaissance Orbiter avait cessé de fonctionner à l'arrivée du rover, Mars Odyssey aurait pu être utilisé comme relais, le débit de données aurait été légèrement inférieur. En outre, le système UHF de l' ESA Mars Express sonde est également en mesure de communiquer avec curiosité , mais cela est uniquement destiné à un court laps de temps lors de situations d'urgence possibles. La RUHF est conçue comme une antenne hélicoïdale et, en raison de son faible effet directionnel, atteint un gain d'antenne d'environ 3 à 6 dB sur une large plage angulaire. Les données sont reçues à 437 MHz et transmises à 401 MHz.

Dans le domaine de la bande X, Curiosity dispose d' un émetteur appelé "Small Deep Space Transponder" (SDST), qui est identique à celui de l'étage de descente . Le SDST à bord de Curiosity n'est normalement pas utilisé pour les communications pendant le vol de croisière car les signaux sont nettement plus faibles que ceux de l'étage de descente. Cependant, si le SDST ou l' amplificateur de cet étage tombe en panne, le système émetteur-récepteur du rover peut également être connecté aux antennes des autres étages via un commutateur. Cependant, ce circuit atténue le signal, qui est 85 % plus faible, de 6 dB , de sorte que le débit de données est plusieurs fois inférieur.
Étant donné que les signaux du SDST sont trop faibles pour envoyer des données, ils sont d'abord amplifiés par ce qu'on appelle "l'amplificateur de puissance à état solide" (SSPA). Il s'agit d'un amplificateur à transistor ( combinaison MESFET / HEMT ), dont la conception est un développement ultérieur des systèmes correspondants du Mars Exploration Rover . Il peut amplifier le signal jusqu'à 15 W, ce qui nécessite jusqu'à 62 W de puissance électrique. L'amplificateur pèse 1,4 kg, est spécifié pour des doses de rayonnement allant jusqu'à 100 krad et a été fabriqué par General Dynamics .
Le HGA (« High Gain Antenna ») est responsable de la réception des commandes et de l'envoi des données d'état dans la bande X. C'est une antenne patch avec un effet directionnel très fort, c'est pourquoi elle doit être alignée très précisément par rapport à la terre. Cependant, malgré la faible puissance de l'amplificateur, des débits de données relativement élevés peuvent être obtenus de cette manière. Il mesure 28 cm de diamètre et pèse au total 8 kg. Avec un alignement optimal, le gain d'antenne est de 26 dB en émission et de 21 dB en réception. Un désalignement de 8° entraîne une réduction de moitié du profit, avec un écart de plus de 12° la communication n'est plus possible. Le débit de données lors de l'envoi est d'au moins 160 bit/s ou 800 bit/s, selon la taille de l'antenne de réception sur terre. Les commandes peuvent typiquement être reçues à un débit de 190 bit/s. La transmission a lieu à une fréquence de 8395 MHz, la réception a lieu à 7183 MHz.
S'il y a un problème avec le HGA (par exemple en raison d'un défaut dans le mécanisme d'alignement), la soi-disant « Rover Low Gain Antenna » (RLGA) est disponible en réserve. Cela n'a pratiquement aucun effet directionnel, ce qui permet la communication depuis presque n'importe quelle position. Cependant, cette propriété réduit fortement le débit de données (sauf quelques bits par seconde dans de mauvaises conditions), de sorte que cette antenne n'est utilisée qu'en cas d'urgence. En raison du signal de transmission extrêmement faible, les données ne peuvent être envoyées à la station au sol que dans de très bonnes conditions (avec quelques dizaines de bits par seconde). Le RLGA est essentiellement un guide d'ondes ouvert avec un accessoire spécial permettant de créer un large diagramme d' antenne avec lui.
Système de conduite

Pour se déplacer à la surface de Mars, on utilise au total six roues, qui sont fixées symétriquement à deux cadres tubulaires (" bogies "), qui sont à leur tour reliés entre eux par un seul axe au centre de gravité de la vagabond. Le titane est utilisé comme matériau pour le cadre , tandis que les roues sont en aluminium, dont la surface est si fine qu'elle se comporte un peu comme des pneus de voiture en caoutchouc conventionnels. Chaque roue mesure 51 cm de diamètre et a une profondeur de sculpture d'environ 1,3 cm. Des évidements rectangulaires et carrés se traduisent par un code Morse par roue , qui sera plus tard vu comme une empreinte sur le sol martien et qui signifie Jet Propulsion Laboratory . (J. - - - P. - -. L. - ..) Il y a un moteur DC sans balais dédié par roue , qui est conçu pour un total de 45 millions de tours pendant toute la mission. Le rover est dirigé via les deux paires de roues à l'avant et à l'arrière, qui peuvent tourner à 90 ° vers la gauche ou la droite, ce qui signifie que Curiosity peut tourner à 360 ° sur place. Le système d'entraînement est capable de déplacer le rover jusqu'à quatre centimètres par seconde et lui permet de faire face à des pentes allant jusqu'à 45 ° (dans toutes les directions) et des obstacles jusqu'à 75 cm de haut. En pratique sur Mars, cependant, ces spécifications ne sont pas totalement épuisées pour des raisons de sécurité, c'est pourquoi une vitesse effective de 0,15 à 0,45 cm/s est supposée, ce qui correspond à une distance de déplacement de 100 à 300 mètres par jour. Le logiciel de contrôle est également programmé de manière à éviter les inclinaisons supérieures à 30°. Afin de réduire la charge de travail de l'équipe au sol, Curiosity est équipé d'un logiciel capable de reconnaître et d'éviter de manière autonome les obstacles. Cela rend effectivement le rover beaucoup plus rapide, car toutes les commandes de mouvement ne doivent pas être envoyées depuis la terre ( temps de transit du signal : jusqu'à 40 minutes). Pour enregistrer les données environnementales requises, quatre caméras dites « Hazard Avoidance Cameras » (Hazcam) sont fixées à la partie inférieure du rover. Il s'agit d'une paire de deux caméras noir et blanc qui couvrent ensemble un champ de vision de 120° et peuvent prendre des images 3D. Cela signifie que toute la zone peut être recherchée à la recherche d'obstacles jusqu'à quatre mètres de distance.
Bras robotisé et prélèvement d'échantillons

Curiosity a un bras robotique d'environ deux mètres de long à l'avant, appelé "Sample Acquisition, Processing, and Handling" ("SA / SPaH" en abrégé). En raison de ses trois articulations, sa conception est similaire au système humain de l' épaule , du coude et du poignet , ce qui le rend très flexible (cinq degrés de liberté ). Cette propriété est nécessaire pour rapprocher certains instruments des objets à examiner. De plus, l'extrémité du bras dispose d'un système de forage, d'une pelle excavatrice , d'une brosse et d'un tamis avec divers récipients de collecte. Avec cet équipement, des couches de sol et de roche plus profondes peuvent également être rendues accessibles pour les analyses. Les deux instruments scientifiques APXS et MAHLI sont découplés du boîtier, ce qui permet d'éviter les problèmes causés par les vibrations lors du perçage. Tous les appareils sont attachés à un élément de tête rotatif à l'extrémité du bras. La partie la plus importante du bras est la perceuse en haut. Celui-ci peut forer des trous jusqu'à 5 cm de profondeur dans la roche, le matériau de la carotte de forage étant pulvérisé et acheminé vers le système de filtration CHIMRA . En plus du mouvement de rotation, la tête de forage est martelée contre la roche cible jusqu'à 30 fois par seconde selon le principe d'une perceuse à percussion , afin qu'elle puisse être mieux pénétrée et broyée. L'énergie d'impact peut être comprise entre 0,05 et 0,8 joule . Si un foret se coince et ne peut plus être retiré, il peut être séparé et remplacé par un nouveau foret. A cet effet, il y a deux embouts de réserve dans des supports correspondants à l'avant du rover. L'ensemble du système de perçage est spécifié pour 81 processus de perçage et peut fonctionner dans une plage de température de +70 °C à -70 °C.
Le système "Collection and Handling for Interior Martian Rock Analysis" (CHIMRA), situé à l'extrémité avant du bras, est responsable de la préparation initiale des échantillons de forage. À l'aide de plusieurs tamis, il peut éliminer les particules de plus de 150 µm ou 1000 µm (selon le réglage) de l'échantillon et diriger le matériau restant dans plusieurs petits récipients collecteurs. De plus, il y a une pelle avec laquelle le sol martien meuble peut être ramassé directement sans perçage. Tous les processus de convoyage sont déclenchés par la rotation et l'inclinaison du bras, et des éléments vibrants sont également installés à certains endroits pour empêcher le matériau de coller à l'intérieur du CHIMRA, car cela pourrait contaminer les échantillons suivants.
Étant donné que les instruments de Curiosity sont très sensibles à la détection de substances organiques, il faut s'assurer que les résultats de mesure ne sont pas faussés par une contamination ou des dommages terrestres. C'est pourquoi il y a cinq conteneurs de la taille d'un poing à l'avant du rover, qui sont remplis d'une céramique de dioxyde de silicium amorphe et d'une petite quantité de deux composés fluoroaromatiques . Ces derniers peuvent être perçus par les instruments, mais ne se produisent généralement pas dans la nature. Si le bloc de céramique est foré, la contamination et les pertes dans le système de transport et d'analyse peuvent être enregistrées sur la base des différences entre les résultats de mesure attendus et réels. Cela signifie que même des résultats de mesure inhabituels peuvent être identifiés de manière fiable comme des erreurs ou comme des faits.
mât

Une caractéristique notable de Curiosity est le mât de 1,1 mètre de haut (également connu sous le nom de mât de télédétection) situé dans le coin avant gauche du châssis. Pour économiser de l'espace, il a été replié pendant le vol de croisière et n'a été remis en position verticale qu'après l'atterrissage. La partie supérieure, qui contient presque tous les instruments, ressemble à la tête humaine en termes de liberté de mouvement, bien qu'elle puisse tourner à 360 °. Les instruments scientifiques suivants sont attachés au mât :
- Caméra de mât (MastCam)
- Chimie et caméra (ChemCam)
- Station de surveillance environnementale Rover (REMS)
Deux « caméras de navigation » (navcams) sont ajoutées à ces instruments pour la navigation et l'orientation. Il s'agit d'un ensemble de quatre caméras noir et blanc identiques avec une résolution effective de 1024 × 1024 pixels chacune. Ceux-ci sont fixés par paires à droite et à gauche de la MastCam et permettent ainsi la création d' images 3D . Une seule caméra à droite et une à gauche sont toujours actives, les deux autres sont connectées à l'ordinateur de sauvegarde et sont donc destinées à une sauvegarde. Les optiques ont une distance focale de 15 mm, un nombre d'ouverture de f/12 et une limite proche de 0,5 m. Avec le capteur d'image CCD, la construction atteint une résolution de 0,82 mrad par pixel et un champ de vision de 45 °. Chaque appareil pèse 220 g et nécessite environ 2,2 W d'énergie électrique pour fonctionner, une photo pouvant être prise toutes les 5,4 secondes avec un temps d'exposition allant jusqu'à 335 secondes.
Instruments scientifiques
Caméra de mât (MastCam)

Dans le "Mast Camera" (court "MastCam") est un complexe de deux caméras haute résolution au grand mât de Curiosity sont attachés. Avec eux, la topologie, les structures de surface fines et l'atmosphère doivent être examinées optiquement dans le spectre visible et proche infrarouge . Parfois, l'utilisation de zooms a été discutée, mais ceux-ci n'ont pas pu être prêts à l'emploi à temps, de sorte que la distance focale est fixe. Les deux caméras utilisent les mêmes capteurs Bayer , qui atteignent une résolution de 1200 × 1200 pixels (1,44 mégapixels) et sont capables d' enregistrer des vidéos 720p à environ 10 images par seconde.
L'électronique de traitement et de stockage temporaire des données d'image est également identique. Il contient 8 Go de mémoire flash par appareil photo , ce qui offre de la place pour environ 5 500 images non traitées. Ceux-ci peuvent ensuite être compressés en temps réel sans perte ou avec perte à l'aide du processus JPEG . La seule différence entre les deux caméras réside dans les filtres disponibles , le champ de vision et la distance focale . Ce dernier est de 34 millimètres pour la Mastcam-34 et de 100 mm pour la Mastcam-100. Le champ de vision est nettement plus grand avec la Mastcam-34 avec 15° qu'avec la Mastcam-100, qui n'atteint que 5,1°. Les deux caméras peuvent faire la mise au point sur une plage de 2,1 m à l'infini , ce qui signifie que la Mastcam-100 peut résoudre des structures avec une précision allant jusqu'à 0,15 mm à une distance de 2 m. De plus, il existe un système de filtrage qui permet des analyses scientifiques ciblées. Les filtres individuels sont montés sur une roue devant le capteur d'image et sont tournés devant lui selon les besoins. Chaque caméra dispose de huit filtres, la Mastcam-34 se concentrant davantage sur le visible, la Mastcam-100 davantage sur l'infrarouge. L'ensemble du complexe MastCam a été conçu et construit par Malin Space Science Systems .
Chimie et caméra (ChemCam)

Le complexe « Chimie & Caméra » (« ChemCam » en abrégé) se compose d'un laser puissant , d'un spectromètre et d'une caméra spéciale. Cette combinaison d'appareils est capable d'analyser le sol martien ainsi que les roches et les gravats à une distance allant jusqu'à 7 mètres avec une grande précision. Pour ce faire, le laser est focalisé sur un petit point afin d'y chauffer fortement la matière. D'une part, les couches supérieures de l'objet peuvent être retirées et, d'autre part, les gaz et plasmas résultants sont examinés pour leur composition par le spectromètre optique . Une partie du complexe est fixée au mât , de sorte qu'un grand nombre de cibles peuvent être analysées en peu de temps grâce à sa bonne mobilité. L'identification rapide des types de roches est donc également la tâche principale de la ChemCam, afin que des cibles intéressantes puissent être trouvées pour des enquêtes plus détaillées avec d'autres instruments. D'autres tâches sont l'analyse des effets de l' érosion et des conditions météorologiques, la détection de traces de glace et de givre ainsi que la détection rapide d' hydrogénocarbonates . Le système est un développement coopératif sous la direction du Laboratoire national de Los Alamos et du CNES ( Centre national d'études spatiales ), l'agence spatiale française basée à Toulouse .
Le complexe laser-spectromètre s'appelle « Laser-Induced Breakdown Spectrometer » ( LIBS ) et est responsable de la partie essentielle de l'analyse. Le laser est une innovation majeure dans les voyages spatiaux, car de tels appareils n'avaient auparavant qu'une portée extrêmement courte ou n'étaient utilisés que pour la mesure de distance. Le laser génère des impulsions infrarouges (1067 nm) d'une longueur de 4,5 ns et d'une énergie allant jusqu'à 14 millijoules sur la surface de l'échantillon. Il est fortement focalisé, résultant en une puissance calorifique de plus de 10 MW par millimètre carré. Cette énergie agit sur une pointe d'un diamètre de 0,3 à 0,6 mm. En raison de la densité de puissance élevée, un petit plasma est généré sur la surface de la cible, dont la lumière émise est captée par un petit télescope (diamètre : 11 cm) et guidée dans un guide d'onde optique . Cela se termine par trois spectromètres optiques, qui couvrent une gamme de longueurs d'onde de 240 à 850 nm ( lumière UV lointain à proche infrarouge) et peuvent différencier 6144 canaux spectraux avec une résolution de 0,09 à 0,30 nm. Les raies d'émission des éléments principaux et secondaires les plus importants, tels que le baryum, le strontium et l'hydrogène, sont incluses dans la gamme de longueurs d'onde.
Pour un meilleur enregistrement du contexte géologique de l'échantillon, le "Remote Micro-Imager" (RMI) est disponible, qui peut enregistrer exactement où exactement le faisceau laser frappe. Il s'agit d'un capteur d'image CCD avec 1024 × 1024 pixels et un champ de vision de 1,1°. Le télescope du LIBS est également utilisé comme optique.
Station de surveillance environnementale Rover (REMS)

La station de surveillance environnementale Rover est responsable des mesures météorologiques générales . L'ensemble du complexe pèse 1,3 kg et a été intégré au projet par l'Espagne. La partie la plus frappante du système sont les deux bras en forme de tige sur le mât . Tout le monde a un anémomètre à fil chaud et un thermomètre à thermopile . Tous les capteurs, à l'exception de l'appareil de mesure UV et du capteur de pression, sont situés sur le mât du rover, l'électronique est logée dans le châssis central.
Six paramètres sont enregistrés :
- La température du sol dans une plage de 150-300 K , avec une précision meilleure que 10 K et une résolution de 2 K.
- Température de l' air de 150 à 300 K (−120 à +30 °C), précision meilleure que 5 K, résolution de 0,1 K.
- Pression d'air de 1 à 1150 Pa , précision 10 Pa (20 Pa vers la fin de la durée de vie), résolution 0,5 Pa. Le capteur de pression est situé sur le châssis à proximité de l'électronique du complexe REMS.
- Humidité relative , 0–100 %, résolution 1 %.
- Rayonnement ultraviolet : La plage de mesure 210-370 nm doit être couverte par six photodiodes (Remarque : à ne pas confondre avec le spectre UV UV-A à EUV !) : 315-370 nm (UVA), 280-320 nm (UVB) , 220-280 nm (UVC), 200-370 nm (dose totale), 230-290 nm (UVD) et 300-350 nm (UVE). Lors de l'étalonnage, il a été constaté que les canaux UVC et UVD ne délivrent qu'un signal faible. Cependant, la caméra du mât prend périodiquement des photos des diodes afin de déterminer la couverture de poussière et de corriger les résultats de mesure en conséquence. Le compteur UV est situé sur le dessus du châssis central.
- La vitesse du vent : Les anémomètres permettent de mesurer des vents horizontaux dans la plage de 0 à 70 m/s avec une précision de 1 m/s et une résolution de 0,5 m/s. Les vents verticaux, en revanche, ne peuvent être enregistrés que jusqu'à 20 m/s. Ils se composent de trois convertisseurs de vent 2D pour déterminer la direction du vent 3D. Des simulations aérodynamiques sont utilisées pour compenser les erreurs de mesure causées par les interférences du rover, du mât et de la flèche.
Chimie & Minéralogie (CheMin)

L'instrument CheMin est un autre spectromètre censé analyser les échantillons de sol collectés. Cela se fait à l'aide d'une source de rayons X, qui irradie l'échantillon, et d'un capteur CCD, qui utilise le phénomène de diffraction des rayons X et de fluorescence X pour déterminer sa composition. Cela peut fournir des informations sur les influences liées à l'eau et les signatures biologiques possibles. L'instrument a été développé et construit par le Centre de recherche Ames .
L'échantillon de sol livré est d'abord passé à travers le système de filtration CHIMRA afin que les composants trop gros ou trop fins qui ne conviennent pas à la mesure puissent être triés. À cette fin, les entonnoirs d'entrée d'échantillons du CheMin (comme avec le SAM) sont mis en vibration par des actionneurs piézo-électriques à l'extrémité inférieure de ces entonnoirs afin de tamiser et d'homogénéiser les échantillons de sol pour l'analyse spectrométrique ultérieure. La conception des entonnoirs d'entrée des échantillons a été vérifiée par des vibromètres laser . Des particules d'une taille allant jusqu'à 150 µm sont ensuite introduites uniformément dans une cellule d'un diamètre de 8 mm. Chaque cellule a une épaisseur de 175 µm, l'échantillon étant rempli entre deux feuilles de Mylar de 6 µm d'épaisseur ou de plastique Kapton . Un total de 27 cellules rechargeables sont disposées sur une roue rotative afin que l'instrument puisse facilement basculer entre plusieurs échantillons. Il y a aussi cinq cellules avec du matériel de référence pour l'étalonnage de l'instrument. Pour analyser un échantillon, sa cellule est positionnée devant la source de rayons X. Cela génère le rayonnement par l'effet du bremsstrahlung , qui se produit lorsque les électrons d'une petite quantité d' isotopes radioactifs du cobalt heurtent le silicium . Les photons de rayons X résultants sont ensuite concentrés en un faisceau d'un diamètre d'environ 50 µm et dirigés sur l'échantillon.
Une fois que le rayonnement a pénétré l'échantillon, il est mesuré par un capteur CCD sensible aux UV de 600 × 600 pixels. Celui-ci analyse la force et la réfraction des photons afin de produire des spectres qui renseignent sur la composition de l'échantillon. Le capteur avec une taille de pixel de 40 × 40 µm effectue 224 mesures par seconde et est refroidi à -60 ° C afin d'obtenir la sensibilité la plus élevée possible. Une mesure complète prend généralement plusieurs heures pour produire de bons résultats.
Analyse d'échantillons sur Mars (SAM)

Le complexe SAM est l'instrument le plus lourd et le plus puissant de Curiosity . Avec une masse de 38 kg, il occupe environ la moitié de la fraction massique totale de la charge utile scientifique. À l'aide de trois systèmes de capteurs combinés, il devrait déterminer dans quelle mesure Mars était et est maintenant un habitat approprié. L'accent est mis sur l'identification et l'analyse des composés organiques et des éléments légers ainsi que sur la détermination des rapports isotopiques dans l'atmosphère. Il a été développé et construit par le Goddard Space Flight Center , la puissance de crête peut aller jusqu'à 240 W.
Le SAM peut analyser des échantillons de sol ainsi que des gaz de l'atmosphère, le matériau devant d'abord être traité. Pour les échantillons de sol, il s'agit du « Sample Manipulation System » (SMS), qui dispose de plusieurs tamis et dirige ensuite le matériau filtré dans l'un des 74 conteneurs de collecte. Si des substances volatiles doivent être évaporées de l'échantillon, celui-ci peut alors être chauffé dans l'un des deux fours au total, où le dégazage a alors lieu. Étant donné que des températures allant jusqu'à 1100 ° C sont atteintes dans les fours, qui nécessitent chacun jusqu'à 40 W de puissance électrique, la pyrolyse des composés organiques est également possible. Le gaz issu de ce procédé, ou un échantillon de l'atmosphère, est ensuite envoyé au Laboratoire de Séparation et de Traitement Chimiques (CSPL). Il s'agit d'un système très complet pour la préparation ultérieure de la mesure. Il se compose de près de 50 vannes, de 16 blocs de vannes et de plusieurs absorbeurs de gaz ainsi que de divers systèmes de mélange et de séparation.
Après la phase de préparation, le gaz peut être introduit dans l'un des trois instruments de mesure. Le chromatographe en phase gazeuse (GC) est particulièrement adapté à l'examen de composés organiques . Il dispose de six colonnes de séparation, chacune spécialisée dans un certain sous-groupe de composés organiques. À l'aide d'un flux d'hélium gazeux, le matériau vaporisé est forcé à travers les colonnes de séparation. Une colonne de chromatographie est également recouverte d'une substance chirale pour permettre la séparation des énantiomères. Les substances organiques sont transportées à travers la colonne à différentes vitesses en fonction de leur interaction avec le matériau de la colonne. Un détecteur de conductivité thermique permet la détection et la détermination en fonction du temps de passage des substances sortant de la colonne. Pour une analyse plus poussée, le gaz peut ensuite être acheminé vers le « Tunable Laser Spectrometer » (TLS), mais surtout vers le « Quadrupole Mass Spectrometer » (QMS). Ce dernier est un spectromètre de masse quadripolaire qui détermine la masse des composants du gaz. En raison de la méthode d'ionisation utilisée, les molécules se décomposent en fragments caractéristiques, qui peuvent être utilisés pour l'identification précise des molécules organiques. La plage de mesure s'étend aux éléments et molécules d'une masse atomique de 2 à 535 u . Alternativement, le spectromètre laser accordable peut être utilisé pour mesurer les composés eau, méthane et dioxyde de carbone . Il se caractérise par une très grande sensibilité pour ces substances et peut également déterminer leur distribution isotopique interne.
Détecteur d'évaluation des radiations (RAD)

L'instrument "Radiation Assessment Detector" a été développé pour mesurer les rayons cosmiques à la surface de Mars. La plage de mesure est très large, de sorte que pour la première fois, la dose totale de rayonnement pour une personne sur Mars peut être déterminée, ce qui est d'une grande importance pour les futures missions habitées sur Mars . Les données de dose de rayonnement sont également un paramètre important pour les hypothèses sur la vie sur Mars . De plus, les gerbes de particules peuvent également être mesurées avec précision, ce qui facilite la vérification des modèles actuels de la structure de l'atmosphère martienne. L'instrument est logé dans le châssis central, pèse 1,56 kg et nécessite 4,2 W de puissance électrique. Il a été développé dans le cadre d'un projet conjoint du Southwest Research Institute , de la Christian-Albrechts-Universität zu Kiel et du German Aerospace Center .
L'ouverture de l'instrument pointe exactement vers le haut et a un champ de vision de 65° pour attraper les particules. Est mesurée au moyen de capteurs à base de silicium avec trois diodes pin , un iodure de césium - scintillateur et un scintillateur plastique à base spécifiquement pour les neutrons. Ces composants sont situés dans la partie cylindre de l'instrument, l'électronique de traitement du signal est située dans la partie inférieure de l'instrument (de couleur or sur l'image de droite). La plage de mesure de l'instrument RAD pour les ions légers ( Z < 9 ) et les protons s'étend de 5 à environ 1300 MeV par nucléon, les ions plus lourds (jusqu'à Z = 26) ne peuvent être détectés qu'à partir de 10 MeV. Les neutrons peuvent être mesurés dans la gamme de 5 à 100 MeV, le rayonnement gamma entre 0,7 et 5 MeV. Les électrons et les positons peuvent être détectés à partir de 0,2 MeV, la limite supérieure pour les électrons est de 100, pour les positrons déjà 1 MeV. Dans la plupart des cas, les particules peuvent être mesurées directement, mais dans le cas des ions, des protons et des électrons, la mesure peut également être effectuée indirectement via l' effet Compton à partir d'une énergie de l'ordre de 120 MeV . En raison de l'alimentation électrique limitée du rover, le RAD n'a fonctionné que pendant un maximum de 16 minutes par heure au moins jusqu'en 2017.
Imageur de descente de Mars (MARDI)

Le "Mars Descent Imager" est une caméra haute résolution qui a pris des photos de la zone d'atterrissage lors de la phase finale de descente (en dessous de 4 km d'altitude). Cela devrait déterminer l'emplacement exact de l'atterrissage et mesurer la zone immédiate avec un degré élevé de précision. L'instrument est fixé à l'avant gauche du châssis central du rover et regarde exactement vers le bas. Le capteur d'image Bayer a 1600 × 1200 pixels et atteint - selon la hauteur - une résolution de 2500 à 0,33 centimètre par pixel, ce qui permet de prendre environ cinq images par seconde. MARDI a été construit par Malin Space Science Systems, pèse 0,66 kg et nécessite jusqu'à 10 W de puissance électrique.
Le champ de vision de l'optique est de 90° ; cependant, seul un champ de 70 ° × 50 ° est représenté, le côté le plus long étant parallèle à la direction du vol. Comme les données n'ont pas pu être transférées immédiatement en raison de la faible bande passante de communication, il existe une mémoire tampon de 8 Go pouvant stocker jusqu'à 4000 images brutes. À l'aide des images haute résolution de l'instrument MARDI, la précision du capteur inertiel du rover doit également être vérifiée. Cela a été fait en comparant la mesure de mouvement du capteur avec le décalage d'image entre deux enregistrements de la caméra.
Spectromètre à rayons X à particules alpha (APXS)
.jpg)
Le "particules alpha X-ray Spectrometer" (APXS pour faire court) est une alpha particule spectromètre à rayons X qui fonctionne sur le principe de l' analyse par fluorescence aux rayons X et une émission de rayons X induite par particules . Le capteur est sur le bras de Curiosity fixe et nécessite un contact très étroit avec le sol. Ses éléments sont amenés dans un état excité au moyen de la radioactivité émise d'une petite quantité de curium-244 , qui se trouve sur la "tête" de l'instrument . Ceux-ci émettent alors des rayons X , qui sont captés par un détecteur de dérive au silicium (SDD). De cette manière, un grand nombre d'éléments peuvent être identifiés et leur proportion dans l'échantillon peut être enregistrée. L'objectif de l'APXS est d'explorer l'environnement géologique du rover et les processus qui ont façonné le sol et la roche. Le spectromètre est particulièrement sensible aux éléments salifiants tels que le calcium ou le brome . L'APXS a été financé par l' Agence spatiale canadienne et construit par MDA Space Missions . Le détecteur de dérive au silicium a été fabriqué par la société bavaroise KETEK.
Le spectromètre de l'instrument peut prendre des mesures dans le spectre des rayons X de 1 à 25 keV, avec une résolution allant jusqu'à 150 eV . Cette résolution n'est atteinte qu'à une température de détecteur inférieure à -45°C, c'est pourquoi un élément Peltier est disponible pour le refroidissement. Le temps d'analyse varie de 10 minutes à 3 heures, selon la sensibilité souhaitée (la fraction massique de certains éléments peut être déterminée avec une précision allant jusqu'à 10 ppm ). Pendant la mesure, une zone circulaire d'un diamètre de 1,7 cm est irradiée, grâce à laquelle l'instrument peut enregistrer des éléments légers jusqu'à une profondeur de 5 micromètres et des éléments lourds jusqu'à 50 micromètres. Quelle que soit la durée de la mesure, l'instrument délivre 32 Ko de données à la fin de l'analyse.
Imageur Mars (MAHLI)
.jpg)
Dans le "Mars Hand Lens Imager" (Mahli) se trouve une caméra haute résolution à l'avant du bras de Curiosity . Il fait office de microscope et est destiné à l'examen optique de très petites structures. Le capteur CCD 1600 × 1200 pixels, qui vient de Kodak , peut résoudre des structures avec une précision allant jusqu'à 15 micromètres par pixel à une approximation maximale (à 25 mm de distance de l'échantillon). En plus de la palette de couleurs et d'échantillons habituelle, un sou de 1909 est également attaché à l'avant du boîtier du rover pour l' étalonnage . Il y a plusieurs LED sur le boîtier de la caméra lui-même afin que les enregistrements puissent également être effectués la nuit. Comme avec la MastCam , les vidéos 720p peuvent également être enregistrées à environ sept images par seconde. MAHLI a été développé et construit par Malin Space Science Systems.
La puce CCD est conçue comme un capteur Bayer et atteint un rendement quantique de 30 à 40 %, selon la longueur d'onde. La surface active est de 105 mm², socle compris, l'électronique photo complète fait 20 mm de large et 33 mm de long. Le temps d'exposition peut être sélectionné entre 0,005 et 2 secondes. En plus des deux paires de LED qui fonctionnent dans le domaine de la lumière visible, il existe également deux modèles pour la lumière UV (365 nm), qui peuvent être utilisés pour détecter des substances fluorescentes dans le spectre ultraviolet .
Albédo dynamique des neutrons (DAN)
À l'aide de l'instrument "Dynamic Albedo of Neutrons", la répartition des composés contenant de l' hydrogène dans le sol martien à une profondeur pouvant atteindre un mètre sera déterminée. Pour cela, le sol est d'abord bombardé de neutrons afin de mesurer le profil énergétique des particules rétrodiffusées. Cette méthode de recherche d'hydrogène est déjà utilisée à de nombreuses reprises sur Terre, mais elle est utilisée pour la première fois sur un autre corps céleste à bord de Curiosity . L'instrument est situé à l'arrière du rover, pèse un peu moins de 5 kg et est fourni par la Russie .
Deux modules distincts sont chargés des mesures : Le DAN-DE contient l'électronique de commande et les capteurs, tandis que le DAN-PNG émet des neutrons libres sur commande au moyen de la réaction 3 H + 2 H → 4 He + n. Avec chaque impulsion de 1 µs, environ 10 millions de neutrons d'une énergie de 14 MeV par particule sont émis dans le sol. Les neutrons rétrodiffusés sont ensuite mesurés par deux capteurs à base de 3 He . Ceux-ci ont une structure identique, l'un n'a qu'un blindage supplémentaire en cadmium avec lequel il bloque les neutrons d'énergie inférieure à 0,4 eV. Les capteurs ont la même limite de mesure supérieure de 1 eV. L'instrument DAN peut effectuer des mesures aussi bien en roulant que lorsque le véhicule est à l'arrêt, dont la durée dans ce dernier cas est comprise entre 2 et 30 minutes, selon la précision recherchée. La distribution verticale de l'hydrogène peut être déterminée avec une résolution en décimètres, dans le plan horizontal des résolutions de 50 cm à 100 m sont la règle le long de la trajectoire du rover.
Progression de la mission jusqu'à l'atterrissage
Début 2011


Le Mars Science Laboratory a été lancé à bord d'un Atlas V (541) avec un étage supérieur « Centaur » le 26 novembre 2011 à 15h02 UTC . C'était le premier démarrage de cette variante de l'Atlas. Le complexe de lancement 41 de l'AFS de Cap Canaveral a servi de site de lancement . Pendant le vol avec le «Centaur», il y a eu de manière inattendue de nombreuses défaillances de la télémétrie, mais cela n'a pas eu d'effet négatif sur le déroulement de la mission : le MSL a été déconnecté environ 44 minutes après le décollage, exactement comme prévu.
Vol vers Mars
Le 1er décembre 2011, le JPL a annoncé qu'une manœuvre en orbite prévue ne serait pas effectuée le 10 décembre, mais environ deux semaines plus tard. La raison en était l'entrée d'une précision inattendue dans l'orbite de transfert de Mars par le niveau supérieur du Centaure. Deux jours plus tôt, il y avait eu des problèmes dans le système de navigation, de sorte que la sonde est passée en mode sans échec. La raison en était un bogue dans le logiciel responsable de l'identification des étoiles dans les images du capteur d'étoiles . Pour cette raison, le contrôle de position n'a été temporairement effectué que via les deux capteurs solaires, tandis que les ingénieurs travaillaient à une solution au problème. A l'exception de ce système, la sonde a pu être remise en mode de fonctionnement normal peu de temps après. Un peu plus tard, l' instrument RAD est entré en service pour collecter des données sur l'exposition aux rayonnements pendant le vol de croisière. Ces mesures doivent être utilisées principalement lors de la planification de futures missions habitées. Le 13 juillet, l'instrument a été à nouveau éteint et configuré pour fonctionner à la surface de Mars. Les premières évaluations ont montré une exposition aux rayonnements significativement plus élevée par rapport à l' ISS , principalement dues au rayonnement cosmique et moins aux émissions du soleil .
Le 9 février 2012, le JPL a annoncé que les problèmes informatiques du système de navigation avaient été corrigés. Une erreur dans le logiciel de gestion de la mémoire entraînait dans certaines conditions des erreurs lors de l'accès au cache d'instructions du processeur. En conséquence, certaines commandes ont été perdues, après quoi la sonde est passée en mode sans échec. Avec un logiciel révisé qui a été installé en mode maintenance, cette erreur pourrait enfin être corrigée définitivement.
Afin d'accélérer les travaux scientifiques, la NASA a réduit la zone d'atterrissage ciblée de 20 × 25 km à 7 × 20 km en juin 2012. Grâce à de nouvelles simulations et estimations de la précision du système d'atterrissage, ce changement permet de réduire de plusieurs mois le temps de trajet du rover vers la zone de recherche principale.
Quelques jours avant l'atterrissage
Le 31 juillet 2012, le Rover Opportunity a été utilisé pour vérifier si un signal de Curiosity pouvait également être reçu directement de la Terre. Ensuite, Opportunity a été programmé pendant neuf jours, puis « garé » afin que le réseau radio et les orbiteurs puissent être aussi libres que possible de toute communication avec Opportunity pour une communication critique avec Curiosity pendant son atterrissage. Après le débarquement de Curiosity le 6 août, l'Opportunity a repris son voyage le 12 août.
Atterrissage août 2012


Le signal que le rover avait touché le sol a été reçu le 6 août 2012 à 5 : 31 : 45,4 UTC et l'atterrissage réussi a été confirmé avec l'arrivée d'une première image à 5 :35. Le site d'atterrissage est à environ 2 km du centre de l'ellipse d'atterrissage prévue. Le temps de propagation du signal était l'heure de l'atterrissage à 13h48 minutes pour à cette époque bien 248 millions de kilomètres de Mars à la Terre.
Après une phase d'évaluation de cinq ans, le cratère Gale a été sélectionné comme région d'atterrissage parmi plus de 100 destinations envisagées. Ce cratère a été choisi car son fond est très profond. De nombreuses couches de matériaux différents se sont déposées ici, notamment des minéraux argileux et des sulfates , qui se forment sous l'influence de l'eau. Entre autres, ces couches pourraient fournir des informations complètes sur l'histoire du climat et de l'atmosphère.
|
|
|
Vidéo de la descente de Curiosity à la surface de Mars (capturée par MARDI )
|

Le tableau suivant contient les étapes les plus importantes de la phase d'atterrissage. Les heures (en UTC) se réfèrent à l'heure locale sur Mars.
| Temps | la taille | phase |

|
|---|---|---|---|
| En dehors de l'atmosphère | |||
| 05:00:45 | 1609 km | Séparation du module de vol de croisière | |
| 1440 km | Lâcher les poids de contrôle pour l'alignement pour l'entrée dans l'atmosphère | ||
| entrée | |||
| 05:10:45 | 127 km | Entrée dans la haute atmosphère | |
| 29 km | Chauffage maximal du bouclier thermique | ||
| 23 km | Freinage maximal de la capsule | ||
| Phase de parachutisme | |||
| 05:15:05 | 11 km | Déploiement du parachute | |
| 05:15:25 | 9,8 km | Séparation du bouclier thermique | |
| 7,6 km | Activation du radar d'atterrissage | ||
| 1,6 km | Séparation de la capsule et du parachute | ||
| Ralentissement | |||
| 1,3 km | Activation des freins moteurs de l' étage de descente | ||
| Phase de grue céleste | |||
| 20 mètres | Curiosité en rappel | ||
| 05:17:39 | 6 mètres | Dépliage du train d'atterrissage Rover | |
| 05:17:57 | 0 m | Contact au sol du rover | |
| Envolez-vous | |||
| Séparation des cordes et envol de la marche de descente | |||
Explorer Mars
2012
Après avoir atterri sur ce qui sera plus tard appelé le site d'atterrissage « Bradbury Landing », la mission principale de Curiosity a commencé par la vérification des instruments et du rover. La mise en service du véhicule et des instruments sur le site d'atterrissage, qui a duré jusqu'au 22 août 2012, a été un succès à l'exception d'un capteur de vent - tandis que l'échantillonneur a été testé pour la première fois sur du matériel approprié sur le chemin de la destination " Glenelg », à 400 mètres .


"Goulburn"

"Relier"

"Hottah"

.jpg)

Sur le chemin, le rover a examiné de plus près les points individuels et a utilisé divers instruments pour la première fois. Le 19 août (Sol 13), toujours sur le site d'atterrissage, une photo a été prise d'un objet appelé "Goulburn", qui a été interprété comme faisant partie d'un lit d' eau . Du gravier a été trouvé sur des enregistrements le 2 septembre (Sol 27) . La région étudiée, appelée « Link » (Sol 26-28), est un cône alluvial , qui est traversé par plusieurs canaux solides, ce qui suggère un écoulement régulier de l'eau. La zone examinée aurait été de la cheville à la taille sous l'eau, qui se déplaçait à environ un mètre par seconde. Quelques jours plus tard, le 14 septembre (Sol 39), le rover a trouvé le soi-disant "Hottah", quelque chose qui a été interprété comme un lit d'eau. Avec ces objets, des preuves directes de l'existence de rivières aquifères sur Mars pourraient être fournies pour la première fois. Cela découle des formes observées des cailloux individuels, qui ne peuvent pas être façonnés par le vent, mais uniquement par l'écoulement de l'eau.

"Jake Matijevic"

"Rocknest"

"Rocknest 3" (Sol 57) dans le "Rocknest"

"Et-Then" (Sol 82) dans le "Rocknest"

"Burwash" (Sol 82) dans le "Rocknest"

"Shaler"






L'objet suivant était une pierre en forme de pyramide d'environ 25 cm de haut et 40 cm de large, appelée "Jake Matijevic". 19.-23. Septembre (Sol 43-47). Le 28 septembre (Sol 50) le rover était arrivé dans la région de "Glenelg", où il est resté plusieurs mois. Différents types de formations de sol entrent en collision ici, ce qui signifie que de nombreuses investigations sont possibles, y compris la pierre dite "Bathurst Inlet" le 30 septembre (Sol 54) et plus tard le champ de sable d'environ 1,5 m sur 5 m avec plusieurs pierres, appelé "Rocknest". À "Point Lake" (Sol 102-111), la foreuse était censée être utilisée pour la première fois, mais une décision a été prise contre elle et une recherche plus longue d'un objet approprié a commencé, et ce n'est qu'à la fin de janvier 2013 que le le premier des trois forages dans la région a été nommé "Yellowknife Bay" a commencé. Le bord de "Shaler" a été découvert le 7 décembre (Sol 120) et quelques jours plus tard, le 11 décembre (Sol 125), le rover a atteint le bord sud-ouest de la région de "Yellowknife Bay", où des investigations scientifiques détaillées étaient prévues. "Yellowknife Bay" se caractérise par le fait que la zone se situe à une cinquantaine de centimètres en dessous de la zone environnante.
A l'aide des premières mesures avec l'instrument SAM, il a pu être confirmé en novembre que la perte d' isotopes lumineux de certaines substances avait une influence considérable sur le développement de la planète. Les mesures montrent une augmentation de cinq pour cent des isotopes lourds du carbone par rapport à l'époque à laquelle l'atmosphère martienne s'est formée. C'est une indication claire d'une perte vers l'espace ouvert, car les isotopes légers migrent vers les couches supérieures de l'atmosphère et y ont été emportés par le vent solaire en raison de l'absence d'un champ magnétique global. De plus, le méthane a été recherché, qui n'est présent qu'en très faibles concentrations dans l'atmosphère. Cependant, les mesures ont fourni des valeurs mesurées si faibles que, en raison de l'imprécision des instruments, il ne peut être exclu qu'il n'y avait pratiquement pas de méthane du tout dans le cratère Gale au moment de la mesure.
Début décembre, tous les instruments disponibles ont été utilisés pour la première fois dans un échantillon de sol. L'échantillon a essentiellement montré une composition qui était déjà connue des missions précédentes du rover. Aucun composé organique n'a été trouvé, mais les instruments plus sensibles de Curiosity ont permis la détection de substances particulièrement faiblement concentrées et la mesure des rapports isotopiques.
2013


Le 17 janvier (Sol 160) le Rover Curiosity a écrasé une petite pierre (3 cm * 4 cm) appelée "Tintina" et l'a cassée. Cela a permis de regarder à l'intérieur et de l'examiner. Ce qui frappe, c'est la couleur blanche de la surface de fracture, qui indique l'accumulation de molécules d'eau ( hydratation ).

Après avoir utilisé le mécanisme de sonnerie

2ème forage à "John Klein"

3e trou à "Cumberland" 19 mai 2013



En janvier, la zone « John Klein » a été désignée comme emplacement du premier puits. Le forage a commencé le 31 janvier 2013 (Sol 174), seul le mécanisme du marteau étant utilisé jusqu'au 2 février (Sol 176), avec lequel la roche pulvérisée près de la surface a été extraite pour le système CHIMRA . Par la suite, le 6 février (Sol 180), le premier forage de seulement 2 cm de profondeur a été foré jusqu'au bout. Un deuxième trou a ensuite été foré juste à côté, cette fois avec une profondeur maximale d'environ 6,5 cm, afin de pouvoir examiner du matériel à des profondeurs plus importantes. Un troisième trou, cette fois à l'emplacement « Cumberland » (Sol 279), a ensuite été foré un peu plus loin.
La raison du long séjour du rover à l'emplacement "John Klein" était qu'il y avait un problème avec le stockage des données de l'ordinateur le 27 février 2013 (Sol 200), c'est pourquoi le rover a été arrêté. Le travail normal n'a pu être repris que le 23 mars (Sol 223). Cependant, comme aucune communication entre Mars et la Terre n'a été possible entre le 8 et le 28 avril 2013 en raison d'une conjonction solaire, le rover est resté là jusqu'en mai et n'a ensuite conduit jusqu'au site "Cumberland", où il a foré le troisième trou de forage le 279e. Sol s'ennuyait.

À la mi-juillet 2013, le rover a quitté la région de « Glenelg » dans le but d'atteindre la base de la montagne centrale « Aeolis Mons » - la NASA l'appelle « Mount Sharp » - l'année prochaine. À cette fin, le rover roulait généralement entre 50 m et 100 m par jour. La limitation de la distance quotidienne du rover est due au fait que les conducteurs sur terre donnent l'itinéraire au rover et pour cela ils ont besoin d'images enregistrées par le rover dans la résolution d'image nécessaire. Le logiciel pour un style de conduite autonome du rover était déjà disponible à cette époque, mais n'était pas encore utilisé., 27 juillet 2013. Pour la première fois, le rover est passé en mode autonomie le 27 août, afin de pouvoir travailler sur une partie d'une étape d'une journée grâce à des photos prises en conduisant pour couvrir de manière autonome le chemin exact vers une destination et éviter les obstacles plus importants.
Sur le trajet de plusieurs kilomètres jusqu'au « Mount Sharp » (arrivée prévue en août 2014), cinq endroits (« waypoints ») où le rover devait effectuer des examens scientifiques de plusieurs jours ont été déterminés par des images satellites. Le 10 septembre, la première cible fut atteinte, "Darwin", une petite dépression où le rover examina plusieurs endroits à 10 sols. Fin octobre 2013, le rover a atteint le deuxième "waypoint", où il a examiné plus en détail le bord de la falaise d'environ 30 mètres de long "Cooperstown". Début décembre 2013, la troisième position est atteinte. Beaucoup de recherches n'ont pas été faites ici, le sujet principal à l'époque était les problèmes de maintenance sur le rover.
Le 12 mars, le JPL a annoncé qu'un grand nombre de ce qu'on appelle les « briques de la vie » avaient été trouvés dans le premier forage de 6,4 cm de profondeur début février. C'est une preuve solide que Mars a pu abriter la vie dans son passé. Dans l'analyse utilisant SAM et CheMin, des quantités importantes des éléments hydrogène , oxygène , carbone , azote , phosphore et soufre ont été trouvées dans l'échantillon. Ceux-ci étaient également dans différents états d'oxydation , suggérant un environnement chimique dynamique, en particulier les composés soufrés comme source d'énergie pour les micro-organismes tels. B. Bactérie verte du soufre , aurait pu servir. Comme tous les éléments ne sont pas oxydés, l'échantillon de roche est plutôt grisâtre et n'est pas de couleur rouille comme la surface de Mars. Le lieu d'échantillonnage était également en bordure d'un ancien lit de rivière, où le pH était modéré et il était généralement humide, ce qui aurait pu rendre la vie encore plus facile.
Les investigations à proximité du site de forage ont également révélé une proportion accrue d'hydrogène à la fois dans le sol et en surface. Cela suggère que les conditions entourant le forage étaient également favorables à la vie.
Après que les premières analyses d'images aient indiqué un lit de rivière et donc de l'eau courante, cette hypothèse a été encore renforcée par une étude publiée en mai. Une mesure quantitative exacte des cailloux trouvés, publiée en mai, a non seulement confirmé cette hypothèse, mais a également trouvé des indications claires d'un débit d'eau auparavant constant pendant au moins plusieurs mois. Selon cela, à une époque où Mars avait encore une atmosphère suffisamment dense, des systèmes fluviaux complexes et permanents auraient pu se former.
Les résultats sur l'exposition aux rayonnements pendant le vol de croisière du MSL ont été publiés le 30 mai. Celles-ci sont basées sur les mesures de l' instrument RAD , qui est à bord de Curiosity et a effectué des mesures pendant tout le vol vers Mars. Le rover a reçu une dose de 1,8 millisieverts par jour , avec seulement 3% de l'exposition au rayonnement provenant du soleil, car le soleil est resté calme et la capsule d'entrée a fourni une protection supplémentaire contre son rayonnement plutôt faible en énergie. En conséquence, l'exposition était principalement due aux rayons cosmiques de haute énergie . La dose totale ainsi obtenue ne serait pas fatale pour les astronautes pendant le vol, mais elle est nettement supérieure aux valeurs limites actuelles, considérées comme acceptables. Sans boucliers supplémentaires, une mission sur Mars augmenterait massivement le risque de cancer pour les astronautes impliqués.
Le 1er août, Curiosity a été le premier rover sur Mars à enregistrer un obscurcissement de la lune Deimos par Phobos avec sa télécaméra . Les données ainsi obtenues servent à préciser davantage les données de chemin .
Au total, six mesures pour trouver du méthane dans l'atmosphère martienne ont été effectuées d'octobre 2012 à juin 2013, mais toutes étaient négatives. Cependant, le 15 juin 2013, le rover a signalé des niveaux de méthane allant jusqu'à 6 ppbv . Plus tard, les données enregistrées par l'orbiteur Esa Mars Express ont mesuré 15,5 ± 2,5 ppbv dans la même région le 16 juin 2013. Dans une période de 60 sols, d'autres mesures ont été effectuées par le rover et les concentrations de méthane y ont également été augmentées, après quoi la valeur est retombée à la valeur moyenne de 0,69 ± 0,25 ppbv. Un champ de glace à l'est du cratère Gale - c'est-à-dire très proche de Curiosity - a été identifié comme une source possible, qui avait longtemps été considérée comme un lac asséché.
Le 12 octobre, le JPL a publié un résumé des découvertes de la zone d'atterrissage de Curiosity. Pour la première fois, une pierre en surface a été datée exactement par radiométrie . Auparavant, il n'était possible de faire des estimations approximatives de l'âge des roches martiennes sur place qu'en utilisant le nombre de cratères d'impact et l'état d'altération. Grâce aux capacités du rover, il était désormais possible de déterminer de manière fiable l'âge en mesurant l' argon emprisonné dans la pierre . Celui-ci est formé par la lente désintégration radioactive du potassium et est libéré dès qu'un échantillon est suffisamment chauffé. Ainsi, en mesurant le rapport entre le potassium et l'argon, l'âge de l'échantillon pourrait être daté de 3,86 à 4,56 milliards d'années, ce qui est en bon accord avec les estimations précédentes. Au cours des investigations, des substances organiques ont également pu être identifiées dans l'échantillon de forage. Cependant, pour le moment, il ne peut être exclu qu'il s'agisse d'une contamination de la terre qui a pénétré le système de mesure pendant la construction.
Plusieurs scientifiques se sont maintenant penchés sur les conditions de vie dans la zone d'atterrissage. Il a été constaté que la plupart des matériaux ont été lavés tardivement et se sont accumulés dans la région. En combinaison avec une composition avantageuse des minéraux argileux, on peut donc supposer que la région était propice à la vie microbienne il y a environ quatre milliards d'années. De plus, ces conditions étaient également présentes pendant une période plus longue qu'on ne le supposait auparavant.
Après une période d'utilisation plus longue, les premiers résultats sur l'exposition aux rayonnements ont également pu être obtenus. Cela représente en moyenne 0,67 millisieverts par jour et environ 95% provient du rayonnement cosmique , car il n'y a eu aucune tempête solaire pendant la période de mesure. En combinaison avec un vol de retour, une personne serait exposée à une charge d'environ 1 000 millisieverts lors d'une mission sur Mars, ce qui augmenterait de 5 % le risque de cancer et de décès. La limite d'exposition actuelle de la NASA ne permettrait pas une telle augmentation du risque, car les astronautes ne sont pas autorisés à continuer à être exposés à des radiations accrues tout au long de leur carrière dès qu'une augmentation de 3% du risque est atteinte. Par conséquent, une future mission nécessitera une radioprotection supplémentaire.
2014

Le 20 avril, Curiosity a pu prendre la première image d'un astéroïde depuis la surface de Mars. La photo montre les deux astéroïdes Ceres et Vesta ainsi que la lune martienne Deimos.

Cinq jours plus tard, un trou d'environ 2 centimètres de profondeur a été foré dans la cible appelée "Windjana". La pierre est candidate au troisième prélèvement et a donc été minutieusement examinée.
Dans la première quinzaine de juillet, le rover a traversé le "plateau de Zabriskie", qui est parsemé de pierres dangereusement tranchantes. L'endommagement des roues en aluminium sur un terrain comparable a obligé à modifier le tracé pour éviter au maximum cette zone rocheuse. Un détour de 200 mètres vers des buts scientifiques plus éloignés a été accepté. Cette difficulté auparavant inattendue pourrait finalement être surmontée avec seulement des dommages mineurs aux roues.
Il y a eu des problèmes avec l'ordinateur de sauvegarde à la fin du mois de juillet. Curiosity a deux ordinateurs principaux identiques et était contrôlé depuis la face B à ce moment-là, car la face A a échoué pendant une courte période en février 2013. Une fois que les problèmes avec le côté A ont pu être résolus, il a pris en charge la tâche du système de sauvegarde. Après que le rover ait cessé de fonctionner pendant deux jours, il a été confirmé que le côté A peut toujours servir de sauvegarde.
Peu avant le deuxième anniversaire du débarquement le 6 août, le rover a atteint le socle rocheux d'Aeolis Mons. Les objectifs réels étaient encore à 3 kilomètres au sud-ouest, mais à moins de 500 mètres se trouvaient les premiers rochers isolés, appelés "Pahrump Hills". Les formations géologiques changent maintenant des structures au fond du cratère Gale aux structures vallonnées au pied de la montagne.
Le 24 septembre, le marteau perforateur a foré un trou de 6,7 centimètres de profondeur dans une pierre de basalte et a recueilli les échantillons de poussière ainsi obtenus. La poussière collectée était initialement stockée dans un conteneur dans le bras du rover. L'échantillon de forage provient de la zone la plus profonde de la montagne, plus tard des roches plus jeunes seront examinées dans des zones plus élevées. L'investigation de ces milieux devrait permettre de mieux comprendre l'origine de la montagne et fournir des indices sur la raison de sa croissance.
En novembre, une correspondance entre les mesures de l'orbite et celles de Curiosity au sol a été annoncée pour la première fois. La poussière de roche rougeâtre du premier forage au pied de la montagne s'accorde bien avec les résultats de l'orbite en termes de composition des minéraux. Le bras du rover avait mis une petite pincée de poussière dans l' instrument Chemin (Chimie et Minéralogie), où il était en cours d'examen. L'échantillon de Pahrump Hills contient significativement plus d' hématites que les analyses précédentes de cette mission. Les hématites sont des minéraux fabriqués à partir d'oxyde de fer et fournissent des indices sur les premiers stades de l'environnement dans lequel elles se sont formées. Les mesures depuis l'orbite ont été effectuées par Mars Reconnaissance Orbiter de la NASA en 2010 .

À la mi-novembre, Curiosity avait terminé le premier tour autour du rocher au pied de la montagne et commençait maintenant à examiner de plus près des cibles sélectionnées lors d'un deuxième passage. Une raison importante du choix de cette région pour la mission était l'espoir de trouver des indices plus précis sur l'évolution de l'environnement sur Mars à partir des rochers au pied de la montagne. Lors de son premier passage à travers les "Pahrump Hills", le rover a parcouru 110 mètres avec un dénivelé de 9 mètres. Les différentes roches et leurs différentes érosions sont d'un intérêt particulier dans les investigations.
Au deuxième tour, des gros plans et des examens spectroscopiques du bras du rover devraient fournir plus de détails sur les objets sélectionnés. Il convient également de décider si d'autres forages seront entrepris lors d'un troisième tour. Les roches à examiner sont des sédiments qui se sont ensuite durcis en roche. La cause pourrait être l'eau stagnante ou qui coule ainsi que le vent. Les enquêtes devraient fournir de nouvelles informations à ce sujet.
Avant ces investigations, les roues ont été testées sur un petit dépôt de sable ; on aimerait mieux comprendre pourquoi ceux-ci ont été plus difficiles à surmonter dans les actions précédentes que prévu. De plus, des travaux ont été menés sur une solution à l'éventuelle défaillance d'un laser pour focaliser le télescope dans le spectromètre ChemCam . Le petit laser a perdu sa puissance et devrait être remplacé par le laser principal avec quelques impulsions courtes.
2015
En janvier, des forages ont eu lieu sur l'échantillon « Mojave 2 ». Il existe des preuves de l'influence de l'eau dans un passé lointain et l'échantillon était plus acide que dans les mesures précédentes. Le marteau perforateur a été utilisé avec une nouvelle technique dans laquelle moins de pression a été exercée sur l'objet. Les premiers tests préliminaires ont révélé un taux élevé de jarosite , un minéral oxydé qui contient du fer et du soufre et qui se forme dans des environnements acides. La question ouverte est de savoir si les sédiments se sont développés dans des eaux acides ou plus tard lors d'inondations.
Un autre trou a été foré le 24 février pour recueillir et analyser des échantillons de poussière supplémentaires. La position appelée "Telegraph Peak" se trouve dans les régions les plus élevées des "Pahrump Hills" au pied d'Aeolis Mons. La composition des échantillons contenait ici plus de silicium par rapport à des éléments tels que l'aluminium ou le magnésium. Cela était plus évident dans le dernier échantillon par rapport aux précédents, plus profonds. La cause pourrait avoir été un lessivage des minéraux. Le forage était le premier qui a eu lieu sans forage d'essai préalable. La technique a de nouveau été utilisée dans laquelle relativement peu de pression a été exercée sur l'objet. Après les enquêtes dans les "Pahrump Hills", le rover devrait être conduit à travers une vallée étroite, appelée "Artist's Drive", vers les régions basaltiques plus élevées de la montagne.
Un court-circuit temporaire le 27 février a interrompu temporairement toutes les opérations du rover. L'incident s'est produit lorsque des échantillons du dernier trou du bras robotique ont été transférés entre différents appareils. Les procédures de sécurité ont arrêté toutes les activités du bras. Le 11 mars, l'échantillon pouvait ensuite être tamisé puis remis à l'instrument CheMin fourni . Lors des tests des dix derniers jours, le court-circuit a pu se reproduire exactement une fois ; cela a duré moins d'un centième de seconde et n'a pas coupé le moteur.
Des investigations avec l' instrument SAM (Sample Analysis at Mars) ont révélé les premières découvertes d'azote en chauffant des sédiments martiens. Les échantillons provenaient du "Rocknest" précédemment recherché. L'azote a été mesuré sous forme d'oxydes d'azote et peut avoir résulté de la décomposition des nitrates lorsqu'ils sont chauffés. Les nitrates peuvent être utilisés par des formes de vie et leur existence donne une autre indication que Mars a pu être favorable à la vie dans le passé. L'azote existe normalement sous forme de molécule (N2) et ne réagit pas avec d'autres molécules. La molécule d'azote doit d'abord être décomposée pour pouvoir ensuite former d'autres composés. Sur terre, il s'agit principalement de processus biologiques, mais dans une moindre mesure également d'événements naturels tels que la foudre.

En mars, la NASA a rapporté les résultats des mesures du gaz noble lourd xénon dans l'atmosphère martienne. Les tests ont été réalisés avec l' instrument SAM (Sample Analysis at Mars). Comme les gaz rares ne réagissent ni avec les éléments de l'atmosphère ni avec ceux du sol, ils sont des indicateurs particulièrement bons de l'état de l'ancienne atmosphère martienne. Le xénon n'est présent qu'en très petites traces et ne peut donc être détecté que directement sur site. Les planètes perdent une certaine partie de leur atmosphère dans l'espace, et Mars en particulier aurait une atmosphère beaucoup plus dense dans sa phase initiale il y a quatre à quatre milliards et demi d'années. Dans un tel processus, les éléments les plus légers sont perdus plus rapidement que les plus lourds. Ceci s'applique également aux différents isotopes du xénon ayant une masse atomique de 124 à 136. L'évolution des proportions de ces isotopes par rapport à la composition naturelle permet de tirer des conclusions sur les processus impliqués dans la perte. Contrairement à d'autres gaz, les interactions avec d'autres éléments peuvent être exclues ici et des données très précises peuvent être obtenues. Les mesures avec l' instrument SAM montrent désormais que les isotopes lourds ont dû également être relâchés dans l'espace lors d'une phase violente. Les isotopes les plus légers n'ont été libérés qu'un peu plus que les plus lourds. Cette composition avait déjà été trouvée dans des météorites martiennes trouvées sur Terre .

Le 16 avril, Curiosity avait parcouru un total de dix kilomètres depuis son atterrissage. Au cours des six derniers mois, il avait exploré les "Pahrump Hills" et se dirigeait maintenant vers le "Logan Pass", une destination à environ 200 mètres au sud-ouest.
Entre le 7 et le 13 mai, le rover a eu des problèmes avec le sol meuble. Lors de trois voyages sur quatre, les roues ont patiné plus que permis et se sont arrêtées. L'ordinateur compare les mesures de la rotation des roues avec la distance calculée à partir des images capturées. Si les différences sont trop importantes, le système s'arrête automatiquement. Ces incidents et d'autres analyses des images panoramiques des environs ont finalement conduit au choix d'un nouvel itinéraire vers le « Logan Pass ».
Après l' échec du petit laser de la ChemCam (Chimie et appareil photo) utilisé pour l'autofocus , il y avait des difficultés à prendre les images avec la précision nécessaire. Le laser principal envoie des faisceaux laser pulsés sur une roche afin de mesurer la roche dynamitée et en évaporation avec un spectromètre. Au cours des derniers mois donc, plusieurs mesures avec des focalisations différentes ont finalement été réalisées et envoyées sur Terre afin de rechercher ensuite les meilleurs résultats. Une nouvelle mise à jour logicielle devrait permettre de déterminer le point de focalisation avec plusieurs images différentes afin de n'effectuer ensuite qu'une mesure laser et de l'envoyer sur terre.

En juin, il y avait une pause obligatoire plus longue car le soleil était exactement entre Mars et la Terre. Cette constellation se répète tous les 26 mois et entraîne une panne temporaire de la liaison radio. Début juillet, le rover se trouvait au « Marias Pass » et découvrit deux types de roches différentes : d'une part, les éboulis connus des « Pahump Hills » et un grès plus foncé et finement incrusté. Sur Mars comme sur Terre, les différentes couches de roches sédimentaires renseignent sur les conditions environnementales lors de leur formation. Curiosity a grimpé une pente allant jusqu'à 21 degrés.
À la mi-juillet, Curiosity a découvert une roche à forte proportion de silice, un matériau composé en grande partie de silicium et d'oxygène et qui se transforme en roche. Sur terre, cela est mieux connu sous le nom de quartz . La région appelée "Elch" se trouve un peu en dessous du "Marias Pass" précédemment étudié. En plus du silicium, une plus grande proportion d'hydrogène a également été trouvée avec les instruments de mesure ChemCam (Chimie et caméra) et DAN (Dynamic Albedo of Neutrons). Cette roche aurait pu contenir de la matière organique et est donc particulièrement intéressante pour des investigations ultérieures plus détaillées. Depuis que le rover a atterri sur Mars le 6 août 2012, à ce moment-là, ChemCam avait examiné 1 000 échantillons et utilisé son laser plus de 260 000 fois. Les tests sur le court-circuit dans le bras du rover n'ont donné aucune autre indication de problèmes, de sorte que d'autres vérifications auraient lieu lors des prochaines investigations scientifiques.

Pour le troisième anniversaire du débarquement, Curiosity a pris un autre « selfie » le 5 août . L'image se compose de nombreux plans individuels et a été découpée de manière à ce que seule une petite partie du bras avec l'appareil photo et l'ombre sur le sol puissent être vues.
Le 12 août, le rover a terminé ses investigations à « Marias Pass » et a poursuivi sa route vers Aeolis Mons. Le 18 août, il avait parcouru 132 mètres ; un total de 11,1 kilomètres depuis 2012. Les échantillons précédemment collectés ont été emportés pour des investigations ultérieures. En particulier, les proportions élevées d'hydrogène trouvées par l' instrument DAN indiquent de plus grandes quantités d'eau sous la surface. L' instrument DAN n'a initialement détecté que des niveaux d'hydrogène étonnamment élevés en mode passif, de sorte que le rover a de nouveau parcouru cette zone. En mode actif, un matériau contenant de l'eau a été détecté sous une couche mince et plus sèche en bombardant le sol de neutrons et en mesurant les réflexions.



Le 29 septembre, la foreuse a foré le huitième trou, d'environ 6,5 centimètres de profondeur, dans une roche martienne, le cinquième depuis qu'il a atteint Aeolis Mons. La pierre percée était un grès normal et les environs donnaient l'impression que de l'eau aurait pu couler ici autrefois.
Début octobre, la NASA a annoncé que des études avaient confirmé l'existence de lacs il y a des milliards d'années. La structure des sédiments au pied de l'Aeolis Mons a montré des preuves évidentes de formation dans les rivières et les lacs il y a environ 3,3 à 3,8 milliards d'années. Il y a des débris de rivières à débit rapide ainsi que des dépôts multicouches d'eaux stagnantes. Ces sédiments des lacs calmes ont formé l'environnement à la base de la montagne et plus haut. Là où se trouve la montagne aujourd'hui, il y avait autrefois un bassin et celui-ci était au moins temporairement rempli d'eau. Selon les mesures du Mars Reconnaissance Orbiter , ces dépôts s'étendent de 150 à 200 mètres à partir de la base de la montagne, peut-être jusqu'à 800 mètres. Il n'y a aucune preuve de couches affectées par l'eau. La question cruciale est de savoir comment l'eau qui coule pourrait exister. L'atmosphère devait être beaucoup plus dense et la température plus chaude que ne le décrivent les modèles actuels. Une partie de l'eau peut avoir été créée sur les pentes par la pluie ou la neige, mais cela n'explique pas comment l'eau a pu être liquide sur une période géologiquement plus longue.
Après des analyses détaillées des filons minéralisés, qui ont été examinés en mars 2015 dans la région appelée « Garden City », la NASA a publié les premiers résultats en novembre. Certaines de ces veines ont jusqu'à deux doigts d'épaisseur et elles se croisent à travers la roche. La formation remonte à des périodes plus sèches au cours desquelles l'eau a lavé des substances de différentes compositions. Les noyaux de différentes périodes ont également des compositions différentes. Des veines contenant du sulfate de calcium et du sulfate de magnésium ont été trouvées; d'autres étaient riches en fluor ou en fer. Ces mesures ont été rendues possibles grâce à la mise à niveau de l' instrument ChemCam et également à l'aide d'environ 350 mesures comparatives de roches dans un instrument de test pour une meilleure compréhension des données. Cependant, les veines donnent également des indices à l'œil nu en raison de leur géométrie ; les veines plus jeunes continuent aux jonctions avec les plus anciennes et donnent ainsi une indication de l'âge relatif.
Ensuite, Curiosity s'est déplacé vers les "Dunes de Bagnold", une région sur le flanc nord-ouest de l'Aeolis Mons avec des dunes étonnamment sombres, dont certaines sont aussi hautes qu'une maison à deux étages et la superficie d'un terrain de football. Les "dunes de Bagnold" sont actives et se déplacent d'environ un mètre par an terrestre. Mais non seulement le mouvement est intéressant, mais aussi le processus par lequel le grès et plus tard la roche ont pu se former à partir de ces dunes.
2016

Au cours des deux derniers mois, Curiosity avait exploré diverses dunes pour découvrir comment le vent se déplace et trie les particules de sable. A cet effet, plusieurs échantillons ont été prélevés et placés dans le dispositif CHIMRA (Collection and Handling for In-situ Martian Rock Analysis). Le deuxième échantillon a été passé à travers deux tamis différents pour obtenir un échantillon de grains de sable de 0,15 à 1 millimètre. Cet échantillon a ensuite été remis au laboratoire de chimie. L'étude de ces dunes actives a été la première en dehors de la terre et a fourni des informations sur les processus de mouvement dans une atmosphère nettement plus mince et avec une gravité plus faible que sur terre. De plus, le rover a roulé dans la dune et a pris la photo montrée à droite.
Début février, le rover a quitté la « Dune du Namib » et s'est dirigé vers d'autres formations rocheuses. Au Sol 1249 (9 février 2016), Curiosity avait atteint la distance de douze kilomètres depuis son atterrissage.
Après les dunes, le rover s'est dirigé vers le plateau de Naukluft , le point le plus élevé à ce jour atteint par le rover depuis son atterrissage dans le cratère Gale en 2012. Une fois sur place, des investigations ont été menées sur les dépôts sur les pentes.
Le plateau de Naukluft était le terrain le plus accidenté que le rover ait dû traverser jusqu'à présent. L'érosion éolienne au cours de millions d'années a rendu la roche très tranchante et l'équipe d'exploitation a dû la contourner, car des dommages aux roues ont été identifiés dès 2013.
Ensuite, le rover a traversé une zone qui ressemblait à un lac asséché et était moins exigeante pour les roues.
Le Curiosity a parcouru 12,7 kilomètres depuis son arrivée sur Mars.
Le 11 mai 2016, le rover a commencé Sol 1337, ce jour-là a commencé sa troisième année martienne sur la planète. Au cours des deux dernières années martiennes, les températures dans le cratère Gale ont fluctué entre 15,9 degrés Celsius un après-midi en été et moins 100 degrés Celsius en hiver. Jusqu'à présent, 34 millions de mesures météorologiques ont été prises par le rover.
Le 2 juillet 2016, le rover est passé de manière inattendue en mode sans échec. Toutes les activités qui ne sont pas essentielles à la survie sont arrêtées et le rover suit un plan fixe afin de pouvoir à nouveau communiquer avec la terre. Les données du logiciel de l'appareil photo et du logiciel de traitement des données de l'ordinateur principal ne correspondaient probablement pas et ont déclenché le mode sans échec. Curiosity s'était déjà mis dans cet état à trois reprises en 2013. La NASA a également prolongé la mission de deux ans, à compter du 1er octobre 2016.
Le 9 juillet 2016, le rover est revenu en mode de fonctionnement normal.
Avec l'instrument Chemistry and Camera (ChemCam), Curiosity a jusqu'à présent visé et examiné plus de 1 400 objets et tiré plus de 350 000 coups avec le laser. Le rock est visé avec le laser de cet instrument. Une petite partie s'évapore et ce plasma est ensuite examiné avec la caméra à une distance pouvant aller jusqu'à sept mètres. En installant un nouveau logiciel, le rover peut désormais sélectionner de nouvelles destinations de manière plus indépendante.

Le 5 août 2016, Curiosity a pris des dizaines de photos avec la caméra du mât (MastCam) pour un panorama à 360 degrés et l'apparition de "Murray Buttes" sur le "Mount Sharp" inférieur. La formation se trouvait sur l'itinéraire prévu du rover et porte le nom de l'ancien planétologue de Caltech Bruce Murray (1931-2013).
Depuis le 6 août 2016, le rover est à la surface de Mars depuis quatre années terrestres et a depuis parcouru 13,57 kilomètres et envoyé plus de 128 000 images sur Terre. Dans la période précédant l'anniversaire, Curiosity a préparé l'enquête du 17e échantillon de sol sur une roche appelée "Marimba". Le 8 septembre 2016, Curiosity a pris des photos de grès stratifié aux "Murray Buttes" avec sa caméra mât (MastCam). Ces montagnes de table et ces pics pointus qui s'élèvent au-dessus de la surface dans cette région sont les vestiges érodés d'anciens grès qui se sont formés lorsque le sable a été déposé par le vent après la formation du mont Sharp inférieur. Ces dunes de sable ont également été altérées chimiquement par les eaux souterraines, enfouies et creusées à nouveau, créant le paysage tel qu'on le voit actuellement sur Mars. Les nouvelles images représentent le dernier arrêt de Curiosity à Murray Buttes, où le rover roule depuis un peu plus d'un mois. Depuis cette semaine, Curiosity a quitté cette région pour le sud et s'est rendu à la base du dernier monticule pointu en sortant. C'est là que le rover a commencé sa dernière campagne de forage (9 septembre). À la fin de ce forage, Curiosity se déplacera plus au sud et plus haut sur le mont Sharp.
Le 14 septembre 2016, Curiosity a effectué une nouvelle tentative de forage, qui a toutefois dû être interrompue en raison d'un court-circuit. Cette tentative a été répétée et achevée avec succès le 18 septembre 2016. Des échantillons de sol provenant de ce forage ont ensuite été acheminés au laboratoire interne. Ce site de forage, le 14e au total pour le rover, se trouve dans une zone composée principalement de mudstone formé à partir de boue accumulée au fond des anciens lacs. De plus, ce site de forage est situé dans une couche géologique d'environ 180 mètres d'épaisseur, la « Formation Murray ». Les résultats montrent que cet environnement lacustre était permanent et non volatile. Depuis la prolongation de la mission de deux ans à compter du 1er octobre 2016, Curiosity a continué à monter sur cette crête du mont Sharp, riche en oxyde de fer, en hématite minérale et en substrat rocheux riche en argile. Cet objectif sur le mont Sharp inférieur, qui a à peu près la taille du mont Rainier , se trouve à environ deux kilomètres et demi et devrait être atteint après environ la moitié de la prolongation de deux ans. Une fois là-bas, le rover enquêtera sur les preuves d'environnements anciens et riches en eau dans les couches plus jeunes du mont Sharp qui contrastent complètement avec la surface martienne rugueuse et sèche d'aujourd'hui.

Le 27 octobre 2016, les scientifiques ont découvert un morceau étrange sur les images de la MastCam de ce jour. Le rover a pris ces photos sur le mont Sharp inférieur dans la "Formation Murray". Le 30 octobre 2016, ce morceau, qui a à peu près la taille d'une balle de golf, a été examiné de plus près avec la ChemCam et il a été déterminé qu'il s'agissait d'une météorite fer-nickel . Ces types de météorites sont également très répandus sur Terre. Ils ont également été vus assez souvent sur Mars, mais ce soi-disant "Egg-Rock" est le premier à être examiné. La météorite a été touchée par le laser ChemCam des dizaines de fois et du fer, du nickel et du phosphore ont été détectés à neuf endroits. Les météorites fer-nickel proviennent probablement d'astéroïdes, au cours de la formation desquels les éléments lourds fer et nickel se déposent à l'intérieur. Ces météorites fournissent des informations sur divers astéroïdes qui se sont désintégrés et dont les noyaux sont tombés sur Mars et la Terre, et Mars peut avoir reçu une population d'astéroïdes différente de celle de la Terre. "Egg-Rock" a frappé Mars il y a des millions d'années. Les scientifiques étudient également comment la surface martienne affecte les météorites par rapport aux météorites sur Terre. Le rover est toujours en bonne forme pour poursuivre ses investigations, ayant travaillé plus de deux fois plus longtemps que sa mission principale initialement prévue d'environ 23 mois, bien que deux de ses dix instruments scientifiques aient récemment montré des signes de performances potentiellement altérées. Le composant générateur de neutrons de l'instrument Curiosity DAN fournit des données indiquant une tension réduite. Même si DAN ne pouvait plus générer de neutrons, l'instrument pourrait continuer à rechercher des molécules d'eau dans le sol en utilisant son mode passif. Les performances de la fonction de mesure du vent du REMS changent également, bien que cet instrument continue de renvoyer quotidiennement des données météorologiques telles que la température, l'humidité et la pression.

Le 1er décembre 2016, le rover n'a pas exécuté correctement un ordre de forage précédemment émis. Le rover a découvert un bug dans une première étape où le mécanisme "d'alimentation de forage" n'a pas prolongé le trépan pour entrer en contact avec la cible rocheuse avec le trépan. Cette 16ème tentative de perçage doit être réalisée pour la première fois uniquement avec le mouvement de rotation de la perceuse et non, comme auparavant, avec une perceuse à percussion et à rotation simultanée. Deux des causes possibles à l'étude sont le fait qu'un frein du mécanisme d'avance du foret ne s'est pas complètement relâché ou qu'un encodeur électronique pour le moteur du mécanisme n'a pas fonctionné comme prévu. Des courts-circuits dans le mécanisme d'impact se sont produits à plusieurs reprises, de façon intermittente et imprévisible, depuis le premier événement en février 2015. Depuis son atterrissage en août 2012, Curiosity a parcouru 15,01 km et plus de 840 mètres depuis son départ des "Murray-Buttes". De plus, le rover a grimpé d'environ 165 mètres, dont 44 mètres depuis les Murray Buttes en septembre 2016.

Au cours des derniers jours de 2016, le rover a examiné une dalle rocheuse appelée "Old Soaker" sur le mont Sharp inférieur. Cette dalle de roche est hachurée avec des crêtes plates, qui se sont probablement formées comme des fissures dans la boue en train de sécher. Si cette interprétation tient, ce seraient les premières fissures de boue - techniquement appelées fissures de séchage - à être confirmées par la mission Curiosity. Ils seraient la preuve que l'ère ancienne où ces sédiments ont été déposés impliquait un certain séchage dans des conditions plus humides. Curiosity a trouvé des preuves d'anciens lacs dans des couches rocheuses plus anciennes et plus profondes et également dans des mudstones plus jeunes au-dessus de "Old Soaker". La couche rompue s'est formée il y a plus de 3 milliards d'années et a ensuite été ensevelie par d'autres couches de sédiments, qui sont toutes devenues des roches stratifiées. Plus tard, l'érosion éolienne a enlevé les couches via le « vieux suintant ». Le matériau qui remplissait les fissures a mieux résisté à l'érosion que le mudstone qui l'entoure, de sorte que le motif des fissures apparaît maintenant comme une crête surélevée. Après avoir examiné cet emplacement, le rover a continué sa montée vers un futur site de forage de roches.
2017


En février 2017, l'été sur Mars, Curiosity a lancé la deuxième campagne d'investigation des dunes de sable actives sur le flanc nord-ouest du mont Sharp. Le rover a également observé des cyclones et vérifié jusqu'où le vent a emporté les grains de sable en une seule journée. En collaboration avec le Mars Reconnaissance Orbiter, une tentative est faite pour découvrir comment une montagne en couches (Mount Sharp) peut apparaître au milieu d'un cratère d'impact (Cratère Gale). Les observations combinées montrent que les modèles de vent dans le cratère diffèrent aujourd'hui de ceux du moment où les vents du nord ont emporté les matériaux qui remplissaient autrefois l'espace entre le mont Sharp et le bord du cratère. Dès 2000, les scientifiques ont suggéré que le mont Sharp dans le cratère Gale était un vestige de l'érosion éolienne. Environ 64 000 kilomètres cubes de matériaux ont été retirés sur des milliards d'années. Le rover arpentait le ruban, les dunes linéaires ce mois-là. La première campagne de dunes fin 2015 et début 2016 a examiné des dunes en forme de croissant. Les images que Curiosity a prises un jour à part montraient que des grains de sable s'étaient déplacés d'environ 2,5 cm dans la direction du vent. De plus, des ouragans, dits « diables de poussière », ont été observés et photographiés. À la fin des observations de dunes programmées, Curiosity se déplacera vers le sud et en montée vers une crête où l'hématite minérale a été identifiée à partir des observations faites par Mars Reconnaissance Orbiter. L'équipe scientifique de Curiosity a décidé de nommer cette caractéristique remarquable « Vera Rubin Ridge » en mémoire de Vera Rubin (1928-2016), dont les observations astronomiques ont fourni la preuve de l'existence de matière noire dans l'univers.

Le 19 mars 2017, lors d'une vérification d'image de routine des roues en aluminium du rover, deux petites fissures ont été trouvées sur les bandes de roulement surélevées de la roue centrale gauche. La dernière inspection de ce type a eu lieu le 27 janvier 2017. Un programme de tests de longévité des roues a été lancé sur Terre en 2013, car des bosses et des trous sont apparus dans les roues peu après le début de la mission. Au 20 mars, Curiosity avait parcouru 16 kilomètres depuis son atterrissage sur Mars en août 2012. L'étude de la transition vers l'unité de sulfate, la destination la plus en montée sur le mont Sharp, nécessitera environ 6 kilomètres ou moins de trajets supplémentaires. Au cours des quatre dernières années, les planificateurs de rover ont utilisé des méthodes améliorées de cartographie des terrains potentiellement dangereux pour réduire le taux de dommages causés par les roches coupantes et incrustées le long de la route du rover.
De début février à début avril 2017, le rover a inspecté quatre emplacements à proximité d'une dune linéaire pour les comparer à ce qu'il a trouvé lorsqu'il a exploré les dunes en forme de croissant à la fin de 2015 et au début de 2016. Cette campagne en deux phases est la première étude rapprochée des dunes actives en dehors de la Terre. Les dunes linéaires sont en montée et à environ 1,6 kilomètre au sud des dunes du croissant. Les deux sites d'étude font partie d'une bande de sable sombre appelée « Dunes de Bagnold », qui s'étend sur plusieurs kilomètres. Ce champ de dunes borde le flanc nord-ouest du mont Sharp, que Curiosity est en train d'escalader. La phase 1 de la campagne était les dunes en forme de croissant, la phase 2 les dunes linéaires actuellement étudiées. L'un des objectifs de l'étude est de répondre à la question de savoir comment le vent forme des schémas différents dans deux dunes relativement proches. La phase 1 a été réalisée pendant une saison de vent faible sur Mars, la phase 2 actuelle pendant la saison des vents. Pour déterminer la force et la direction du vent, le rover prend des paires d'images à différents moments afin de vérifier ensuite le mouvement des grains de sable. Un échantillon de sable des dunes linéaires est situé dans le dispositif d'échantillonnage à l'extrémité du bras du rover. Une partie a été analysée avec l'instrument SAM à l'intérieur du rover. L'équipe scientifique prévoit de livrer plus d'échantillons à SAM et au CheMin du Rover. Un facteur dans la décision de poursuivre la montée avant que l'analyse du sable collecté ne soit terminée est l'état de la foreuse Curiosity, qui n'a pas été utilisée sur la roche depuis qu'un problème avec le mécanisme d'avance de la foreuse est survenu il y a cinq mois. Les ingénieurs étudient actuellement comment l'utilisation des vibrations pendant la livraison de l'échantillon peut affecter le mécanisme d'avance du foret qui déplace le foret d'avant en arrière. De plus, les vents forts à l'emplacement des dunes linéaires ont rendu difficile le processus de versement des échantillons dans les ouvertures d'entrée des instruments de laboratoire.

Le 2 juin 2017, les résultats des recherches de Curiosity ont été publiés dans la revue Science . Il y avait un lac dans le cratère Gale il y a 3 milliards d'années. À l'aide des lourds instruments du rover, il a été possible de déterminer que le lac était stratifié. Les plans d'eau stratifiés présentent de fortes différences chimiques ou physiques entre les eaux profondes et les eaux peu profondes. Dans le lac Gale, les eaux peu profondes étaient plus riches en agents oxydants que les eaux plus profondes. Dans un même lac régnaient simultanément différentes conditions favorables à différents types de microbes. Ce type de stratification d'oxydation est une caractéristique des lacs sur Terre et a maintenant également été trouvé sur Mars. Les différences dans les propriétés physiques, chimiques et minérales de plusieurs endroits sur la partie inférieure du mont Sharp ont d'abord intrigué l'équipe du rover. Par exemple, certaines roches présentaient une stratification plus épaisse avec une plus grande proportion d'un minéral de fer appelé hématite, tandis que d'autres roches avaient des strates très fines et plus d'un minéral de fer appelé magnétite. La comparaison de ces propriétés a suggéré des environnements de dépôt très différents. On examine si ces différences sont dues à des conditions environnementales qui fluctuent dans le temps ou si elles diffèrent d'un endroit à l'autre. À la mi-2017, Curiosity continuera de se concentrer sur les couches plus hautes et plus jeunes du mont Sharp pour étudier comment l'ancien environnement marin a évolué vers un environnement plus sec plus semblable à celui de Mars moderne.

En 2014 et 2015, le rover a foré plusieurs trous sur le mont Sharp inférieur dans une zone appelée les collines de Pahrump. Les résultats ont été présentés dans la revue Earth and Planetary Science Letters . Les minéraux trouvés dans les quatre échantillons examinés près de la base du mont Sharp suggèrent que plusieurs environnements différents étaient présents dans l'ancien cratère Gale. Il existe des preuves d'eau avec différentes valeurs de pH et différentes conditions d'oxydation. Les minéraux indiquent également qu'il y avait plusieurs régions sources pour les roches dans "Pahrump Hills" et "Marias Pass". Dans les échantillons "Confidence Hills" et "Mojave 2", les scientifiques ont trouvé des minéraux argileux qui se forment généralement en présence d'eau liquide avec un pH presque neutre et pourraient donc être de bons indicateurs d'environnements antérieurs potentiellement mortels. L'autre minéral découvert ici était la jarosite, un sel qui se forme dans des solutions acides. La découverte de la jarosite suggère que des fluides acides ont existé dans cette région à un moment donné.
Statut actuel
En octobre 2020, le rover avait parcouru près de 23,13 km. Les deux photos montrent les kilomètres et la localisation en octobre 2020 :
- Étendues de curiosité sur Mars
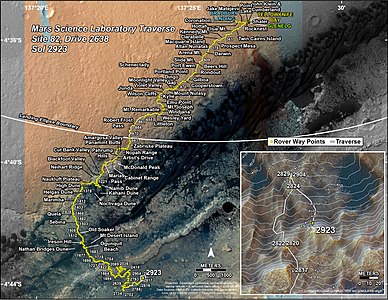
Tout le parcours jusqu'au 26 octobre 2020 (Sol 2923)

Vue détaillée du 26 octobre 2020 (Sol 2923)
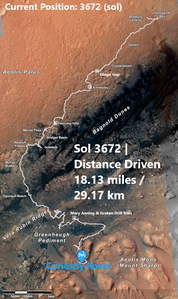
La route des curiosités



Photos panoramiques sélectionnées








Anecdotes
Envoyez votre nom sur Mars
Sous le mot-clé "Send Your Name to Mars" , la NASA a permis aux participants intéressés de s'inscrire afin que leur nom puisse être immortalisé sur une puce électronique dans le Mars Science Laboratory Rover. En novembre 2010, 958 424 personnes dans le monde s'étaient déjà inscrites sous leur nom. En fin de compte, 1,2 million de noms ont été scannés, gravés au laser sur deux petites puces électroniques de la taille d'une pièce de monnaie et installés à bord du rover. Une campagne similaire sous le même nom (« Envoyez votre nom sur Mars ») a déjà eu lieu avec le prédécesseur Spirit , dans laquelle environ quatre millions de noms d'écoliers et d'étudiants ont été gravés sur un DVD.
Léonard de Vinci
De plus, l'autoportrait de Léonard de Vinci et certains de ses textes et dessins (par exemple son code sur le vol des oiseaux ) ont été réduits à des dimensions microscopiques et également placés à bord du rover.
Voir également
Littérature
- Emily Lakdawalla : La conception et l'ingénierie de la curiosité. Springer Praxis, Cham (Suisse) 2018, ISBN 978-3-319-68144-3
liens web
Photos et vidéos
- Jet Propulsion Laboratory : Curiosity Live Cam
- Mars Science Laboratory Curiosity Rover Animation sur YouTube
- Mars Panorama 360° sans balance des blancs
- Historique de la mission avec galerie de photos sur l'édition en ligne du New York Times
- 35C3 - L'ordinateur de bord du Mars Rover Curiosity , version allemande de la vidéo
- Statut en direct
Preuve individuelle
- ↑ a b YouTube : lancement du laboratoire scientifique de Mars
- ↑ a b Chronologie de la mission. NASA, 6 août 2012, consulté le 7 août 2012 .
- ^ Nouvelles frontières dans le système solaire : Une stratégie d'exploration intégrée. National Academies, pp. 84, 194 , consulté le 31 juillet 2012 .
- ↑ a b Laboratoire scientifique de Mars. (N'est plus disponible en ligne.) JPL, archivé à partir de l' original le 31 décembre 2004 ; Consulté le 31 juillet 2012 .
- ↑ Sites d'atterrissage débattus pour le prochain Mars Rover. Space.com, consulté le 31 juillet 2012 .
- ↑ État du budget MSL. (PDF ; 92 ko) NASA, consulté le 31 juillet 2012 .
- ^ Mars Science Laboratory - Statut du projet pour PSS. (PDF ; 92 ko) NASA, consulté le 31 juillet 2012 .
- ↑ Statut technique et de replanification MSL. (PDF; 4,4 Mo) NASA / Richard Cook, consulté le 31 juillet 2012 .
- ↑ Prochaine mission de la NASA sur Mars reprogrammée pour 2011. JPL, consulté le 31 juillet 2012 .
- ↑ Mars Science Lab a besoin de 44 millions de dollars de plus pour voler, selon un audit de la NASA. (N'est plus disponible en ligne.) Space News, 8 juin 2011, archivé à partir de l' original le 22 mars 2012 ; Consulté le 31 juillet 2012 .
- ↑ La NASA sélectionne l'entrée de l'étudiant comme nouveau nom du rover Mars. JPL, consulté le 31 juillet 2012 .
- ↑ NASA Mars Rover arrive en Floride après un vol de cross-country. JPL, consulté le 31 juillet 2012 .
- ↑ Le prochain rover martien de la NASA atterrira au cratère Gale. JPL, consulté le 31 juillet 2012 .
- ^ Centre aérospatial allemand (éd.) : Sites d'atterrissage sur Mars . doi : 10.5446 / 12727 .
- ^ Laboratoire scientifique de Mars : Objectifs. JPL, consulté le 1er août 2011 .
- ^ Laboratoire scientifique de Mars : Vue d'ensemble. JPL, consulté le 1er août 2011 .
- ↑ a b c d e Résumé du vaisseau spatial. JPL, consulté le 10 avril 2011 .
- ↑ EMCORE PhotoVoltaics remporte un contrat de fabrication de panneaux solaires pour l'étage de croisière sur Mars du Jet Propulsion Laboratory (JPL) de la NASA. (N'est plus disponible en ligne.) EMCORE Corporation, 28 avril 2007, archivé à partir de l' original le 4 juin 2013 ; consulté le 10 avril 2011 . Info : Le lien d'archive a été inséré automatiquement et n'a pas encore été vérifié. Veuillez vérifier le lien d'origine et d'archive conformément aux instructions , puis supprimez cet avis.
- ↑ a b c d e Mars Science Laboratory : Cruise Configuration. JPL, consulté le 10 avril 2011 .
- ↑ a b 2011 Atelier Applications thermoélectriques. (PDF ; 3,3 Mo) JPL, consulté le 10 avril 2011 .
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac ad ae af ag ah ai aj ak Andre Makovsky, Peter Ilott, Jim Taylor : Mars Science Laboratory Conception de système de télécommunications. (PDF; 5,7 Mo) Dans : Systèmes de communication et de navigation dans l'espace lointain. JPL, novembre 2009, consulté le 9 avril 2011 .
- ↑ a b c d Mars Science Laboratory Aeroshell (MSL). (N'est plus disponible en ligne.) Lockheed Martin, archivé à partir de l' original le 28 décembre 2011 ; consulté le 10 avril 2011 .
- ^ Premier panorama à 360 degrés du Curiosity Mars Rover de la NASA. JPL, consulté le 7 août 2012 .
- ^ Un b Paul B. Brugarolas, A. Miguel San Martin, Edward C. Wong : Le contrôleur d'attitude RCS pour les phases d'entrée exo-atmosphérique et guidée du Mars Science Laboratory. (PDF ; 1,9 Mo) California Institute of Technology, 2010, consulté le 4 juin 2011 .
- ↑ David W. Way, Richard W. Powell, Allen Chen, Adam D. Steltzner, A. Miguel San Martin, P. Daniel Burkhart, Gavin F. Mendeck : Mars Science Laboratory : Entry, Descent, and Landing System Performance. (PDF ; 3,3 Mo) Dans : Actes de la conférence IEEE Aerospace 2006, Big Sky, MT, 3-10 mars 2006. Consulté le 18 août 2012 .
- ^ Un b Test de qualification de parachute du laboratoire scientifique de Mars. JPL, consulté le 7 mai 2011 .
- ↑ a b c d e MSL coin des sciences: MSL EDL Instrument (Medli) Suite. JPL, consulté le 11 juin 2011 .
- ^ NASA: Dernières minutes de l'arrivée de Curiosity sur Mars. Consulté le 18 octobre 2011 .
- ↑ a b c d e f g h i j Miguel San Marti: Le MSL SkyCrane Landing Architecture - Un GN & C Perspective. (PDF; 6,4 Mo) JPL, juin 2010, consulté le 7 mai 2011 (anglais).
- ↑ a b Atterrissages du rover d'exploration de Mars. (PDF ; 317 Ko) JPL, consulté le 30 juillet 2012 .
- ↑ a b c Mars Pathfinder / Sojourner. (N'est plus disponible en ligne.) NASA, archivé à partir de l' original le 25 février 2014 ; Consulté le 30 juillet 2012 .
- ↑ Le laboratoire scientifique de Mars 2009 de la NASA. (PDF ; 2,0 Mo) JPL, consulté le 5 juin 2011 .
- ↑ Mission Pathfinder Mars - Mini-rover Sojourner. (PDF ; 2,6 Mo) Consulté le 5 juin 2011 .
- ^ Vaisseau spatial : Opérations de surface : Rover. JPL, consulté le 30 juillet 2012 .
- ↑ Introduction à Mars microrover. JPL, consulté le 30 juillet 2012 .
- ^ Télécommunications de Rover d'exploration de Mars. (PDF ; 7,0 Mo) JPL, consulté le 5 juin 2011 .
- ^ Le Temple de la renommée des robots : Mars Pathfinder Sojourner Rover. (N'est plus disponible en ligne.) Robothalloffame.org, archivé à partir de l' original le 7 octobre 2007 ; Consulté le 5 juin 2011 .
- ↑ a b Innovations avioniques pour la mission Mars Exploration Rover : augmenter la puissance du cerveau. JPL, consulté le 30 juillet 2012 .
- ↑ a b Institut de recherche planétaire Berlin-Adlershof. (N'est plus disponible en ligne.) Archivé de l' original le 4 mars 2016 ; Consulté le 27 juillet 2012 .
- ↑ a b Mission - Puissance. NASA / JPL, consulté le 15 mars 2011 .
- ↑ a b Espace radioisotopes Power Systems - Multi-Mission thermoélectriques radio - isotopiques Generator. (PDF) (Plus disponible en ligne.) US Department of Energy, archivé à partir de l' original le 15 juin 2011 ; Consulté le 15 mars 2011 .
- ^ Un b Les systèmes nucléaires du département de l'énergie alimentent Mars Rover. Office of Public Affairs du Département de l'énergie des États-Unis, consulté le 6 août 2012 .
- ↑ Calcul à partir des 14 années terrestres de la source : Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power ( Memento du 9 août 2012 dans Internet Archive ), consulté le 8 août 2012
- ↑ Boeing va construire un groupe électrogène spatial. spacedaily.com, consulté le 15 mars 2011 .
- ↑ a b c NASA - Advanced Radioisotope Power Conversion Technology Research and Development , page 6, décembre 2004 (PDF; 600 ko). Consulté le 6 août 2013
- ↑ Bernd Leitenberger : Les éléments radio-isotopes à bord des sondes spatiales, consulté le 8 avril 2011
- ^ A b Mars Science Laboratory - Lancement de la sûreté nucléaire. (PDF; 266 Ko) NASA, consulté le 7 mai 2011 .
- ↑ Missions spatiales américaines utilisant des systèmes d'alimentation à radio-isotopes. (PDF; 930 Ko) American Nuclear Society, avril 1999, consulté le 30 juillet 2012 .
- ↑ Batteries de curiosité recharger ses batteries. JPL, 24 juillet 2012, consulté le 25 juillet 2011 .
- ↑ Max Bajracharya, Mark W. Maimone, Daniel Helmick : Autonomie pour Mars Rovers : Passé, Présent et Futur. (PDF ; 3,7 Mo) Ordinateur, page 2 (45) , consulté le 18 avril 2011 .
- ↑ a b c Microprocesseur PowerPC RAD750 durci aux radiations. BAE Systems, consulté le 16 novembre 2014 .
- ^ Laboratoire scientifique de Mars : cerveaux. JPL, consulté le 18 avril 2011 .
- ↑ a b Klaus Have Lund, Alex Groce, Margaret Smith, Howard Barringer : Surveillance de l'exécution du logiciel de vol des engins spatiaux. (PDF ; 7,8 Mo) (N'est plus disponible en ligne.) JPL, 2009, p. 6 , archivé à partir de l' original le 19 juillet 2011 ; Consulté le 18 avril 2011 .
- ^ Curiosité de bâtiment : Rover Rocks Rocker-Bogie. JPL, consulté le 19 avril 2011 .
- ↑ Questions fréquemment posées. (N'est plus disponible en ligne.) JPL, archivé à partir de l' original le 16 avril 2011 ; Consulté le 20 avril 2011 .
- ^ Nouveau Mars Rover avec code Morse. ARRL, consulté le 26 novembre 2011 .
- ^ Fuk Li : Statut du laboratoire scientifique de Mars. (PDF ; 2,2 Mo) JPL, septembre 2009, consulté le 22 avril 2011 .
- ^ A b c Mars Science Laboratory: Les roues et les jambes. JPL, consulté le 20 avril 2011 .
- ↑ a b Mars Science Laboratory 2009 de la NASA. (PDF ; 2,0 Mo) JPL, page 5 , consulté le 20 avril 2011 .
- ↑ a b c d Avi B. Okon: Mars Science Laboratory Exploration. (PDF ; 2,1 Mo) Dans : Actes du 40e Symposium sur les mécanismes aérospatiaux, NASA Kennedy Space Center, 12-14 mai 2010. Mai 2010, consulté le 11 août 2011 .
- ↑ a b c MSL Science Corner : Système d'échantillonnage. JPL, consulté le 14 août 2011 .
- ↑ a b c P. G. Conrad, JE Eigenbrode, CT Mogensen, MO Von der Heydt, DP Glavin, PM Mahaffy et JA Johnson: The Mars Science Laboratory Organic Check Material. (PDF; 214 ko) Dans : 42e Conférence sur les sciences lunaires et planétaires (2011). 2011, consulté le 14 août 2011 .
- ↑ a b c d e f g MSL Science Corner : Mast Camera (MastCam). JPL, consulté le 22 avril 2011 .
- ↑ a b c d e f g h i MSL science virage: Chemistry & objectif (ChemCam). JPL, consulté le 22 avril 2011 .
- ^ Javier Gómez-Elvira : Station de surveillance environnementale Rover (REMS). JPL , consulté le 25 août 2016 .
- ^ Station de surveillance environnementale Rover pour la mission MSL. (PDF; 341 ko) Dans : 4e Atelier international sur l'atmosphère martienne : modélisation et observations. Université Pierre et Marie Curie , février 2011, consulté le 11 juin 2011 .
- ↑ a b c d e f g h Chimie et Minéralogie (CheMin). JPL, consulté le 13 mai 2011 .
- ↑ a b Projets en cours de la SPRL - Sample Analysis at Mars. SPRL, consulté le 4 juin 2011 .
- ↑ a b MSL Science Corner : Analyse d'échantillons sur Mars (SAM). JPL, consulté le 4 juin 2011 .
- ↑ a b c d e f g h Paul Mahaffy : L'analyse d'échantillons à la suite de Mars et ses investigations sur le méthane. (PDF) NASA Goddard Space Flight Center, novembre 2009, consulté le 4 juin 2011 .
- ↑ a b MSL Science Corner : Détecteur d'évaluation des radiations (RAD). JPL, consulté le 5 juin 2011 .
- ^ Le détecteur d'évaluation des radiations (RAD) sur le Mars Science Laboratory (MSL). (PDF; 127 Ko) Dans: 40th Lunar and Planetary Science Conference (2009). Lunar and Planetary Institute, consulté le 5 juin 2011 .
- ^ Étalonnage du détecteur d'évaluation des radiations (RAD) pour MSL. (PDF; 4,5 Mo) Southwest Research Institute, consulté le 5 juin 2011 .
- ^ Analyse du risque de rayonnement observé par RAD à la surface de Mars lors de l'événement de particules solaires de septembre 2017. (PDF; 0,5 Mo) 2018, consulté le 29 juillet 2019 (anglais).
- ↑ a b c d e MSL Sciences virage: Mars Descent Imager (MARDI). JPL, consulté le 9 juin 2011 .
- ↑ a b c d e f des particules alpha et des rayons X Spectromètre (APXS). JPL, consulté le 7 mai 2011 .
- ↑ KETEK atterrit sur Mars. KETEK, consulté le 4 mai 2017 .
- ↑ a b c d e Mars main Lentille Imager (MAHLI). JPL, consulté le 7 mai 2011 .
- ^ Le Rover de la NASA lié à Mars transporte une pièce de monnaie pour le contrôle de la caméra. JPL, consulté le 10 février 2012 .
- ↑ a b c d e f Etude de l'albédo dynamique des neutrons (DAN) sur MSL. (PDF; 689 ko) NASA, consulté le 12 août 2012 .
- ↑ NASA TV en direct
- ^ Rapport d'état de la mission du laboratoire scientifique de Mars : cours excellent, ajustement reporté. JPL, consulté le 3 décembre 2011 .
- ↑ Curiosité rayonnement des mesures dans l' espace. Raumfahrer.net, consulté le 14 décembre 2011 .
- ↑ Le rover de la NASA Mars-Bound commence ses recherches dans l'espace. JPL, consulté le 3 décembre 2011 .
- ^ L'instrument de rayonnement termine les mesures en vol. JPL, consulté le 18 juillet 2011 .
- ↑ La plus récente mission de la NASA sur Mars relie le passé et le futur. JPL, consulté le 8 mars 2012 .
- ^ Problème d'ordinateur de vaisseau spatial résolu. JPL, consulté le 10 février 2012 .
- ↑ L'équipe Mars Rover de la NASA vise à atterrir plus près du site scientifique principal. JPL, consulté le 18 juillet 2012 .
- ↑ "Opportunity Updates - sols 3023-3029, 25 juillet 2012 - 01 août 2012: Opportunity Prepares for Curiosity's Arrival!" Sur nasa.gov , consulté le 12 août 2012
- ↑ "Opportunity Updates - sols 3036-3042, 08-14 août 2012: Opportunity is on the Move Again!" Sur nasa.gov , consulté le 20 août 2012
- ↑ Chronologie de l'atterrissage : chronologie des événements majeurs de la mission pendant l'atterrissage de Curiosity (NASA 8 août 2012)
- ↑ mise à zéro sur le site d'atterrissage de Rover. JPL, consulté le 19 août 2012 .
- ↑ Distance Mars-Terre le 6 août 2012 à 5h31 UTC calculée par wolframalpha.com : 1,659 AU , consulté le 22 août 2012. La conversion en minutes-lumière donne environ 13,79 ou 13h48
- ↑ a b c Le prochain rover sur Mars de la NASA atterrira au cratère Gale. JPL, consulté le 22 juillet 2011 .
- ↑ NASAtélévision : Défis pour se rendre sur Mars : les sept minutes de terreur de Curiosity (HD)
- ^ Chronologie des événements majeurs de la mission pendant l'atterrissage de Curiosity. JPL, consulté le 14 août 2011 .
- ↑ Comment atterrir sur Mars ? JPL, consulté le 14 août 2011 .
- ↑ NASA Curiosity News Briefing 22 août (Vidéo 54 min)
- ↑ Un rover de la NASA trouve un vieux lit de ruisseau sur la surface martienne. JPL, consulté le 12 janvier 2013 .
- ↑ NASA Rover trouve des indices sur les changements dans l'atmosphère de Mars. JPL, consulté le 12 janvier 2013 .
- ↑ La NASA Mars Rover analyse entièrement les premiers échantillons de sol martien. JPL, consulté le 12 janvier 2013 .
- ↑ marspages.eu : Conjonction solaire en avril 2013 , consulté le 22 mars 2019
- ↑ Ralph-Mirko Richter, raumfahrer.net : Des voyages plus longs pour le rover martien Curiosity
- ↑ marspages.eu: Autonomie en mode , Août 2013
- ↑ marspages.eu: Darwin , Septembre 2013
- ↑ Le rover de la NASA trouve des conditions autrefois propices à la vie ancienne sur Mars. JPL, consulté le 13 mars 2013 .
- ↑ Curiosity Mars Rover voit une tendance dans la présence d'eau. JPL, consulté le 10 mai 2013 .
- ↑ galet Rocks Témoignez à Old streambed sur Mars. JPL, consulté le 17 août 2013 .
- ↑ Les données du voyage vers Mars de la NASA Rover facilitent la planification. JPL, consulté le 17 août 2013 .
- ↑ NASA Rover Comme film A Obtient Mars Lune passe autre. JPL, consulté le 17 août 2013 .
- ↑ NASA Curiosity Rover Détecte Aucun méthane sur Mars. JPL, consulté le 23 septembre 2013 .
- ↑ pro-physik.de: Mars - Das méthane-Rätsel , du 11 Avril, 2019.
- ↑ marsdaily.com : Confirmation de mystérieuses explosions de méthane martien , le 5 avril 2019.
- ↑ sciencemag.org : Détection et variabilité du méthane sur Mars au cratère Gale , 23 janvier 2015.
- ↑ marsdaily.com : Des scientifiques découvrent une source probable de méthane sur Mars , le 1er avril 2019.
- ↑ a b c NASA Curiosity : Première aide à la mesure de l'âge de Mars et à l'exploration humaine. JPL, consulté le 25 décembre 2013 .
- ^ Première image d'astéroïde de la surface de Mars (annotée). JPL, 24 avril 2014, consulté le 6 mai 2014 .
- ↑ La cible sur Mars semble bonne pour le forage de la NASA Rover. JPL, 30 avril 2014, consulté le 6 mai 2014 .
- ↑ NASA Mars Rover Curiosity s'approche d'un affleurement de la base de la montagne. NASA, 1er août 2014, consulté le 5 janvier 2016 .
- ↑ NASA Rover Drill First Taste De Pulls Mars Montagne. NASA, 25 septembre 2014, consulté le 5 janvier 2016 .
- ↑ Curiosity Mars Rover de la NASA trouve une correspondance minérale. NASA, 4 novembre 2014, consulté le 5 janvier 2016 .
- ^ Deuxième fois, Mars Rover examine les roches choisies. NASA, 18 novembre 2014, consulté le 5 janvier 2016 .
- ↑ Échantillon d'analyse de curiosité de la NASA de la montagne martienne. NASA, 3 février 2015, consulté le 6 janvier 2016 .
- ↑ Curiosity Mars Rover Drills de la NASA à « Telegraph Peak ». NASA, 24 février 2015, consulté le 6 janvier 2016 .
- ↑ Tests pour diagnostiquer l'événement de puissance dans Mars Rover. NASA, 3 mars 2015, consulté le 6 janvier 2016 .
- ↑ Rover bras Rend Roche poudre échantillon. NASA, 12 mars 2015, consulté le 6 janvier 2016 .
- ↑ Le Curiosity Rover de la NASA trouve de l'azote biologiquement utile sur Mars. NASA, 24 mars 2015, consulté le 6 janvier 2016 .
- ↑ La curiosité renifle l'histoire de l'atmosphère martienne. NASA, 31 mars 2015, consulté le 7 janvier 2016 .
- ↑ Curiosity Rover de la NASA faisant des traces et des observations. NASA, 16 avril 2015, consulté le 7 janvier 2016 .
- ↑ Le Curiosity Rover de la NASA ajuste l'itinéraire jusqu'à la montagne martienne. NASA, 22 mai 2015, consulté le 8 janvier 2016 .
- ↑ Mars Laser-Zapper Instrument Rover se aiguise Vision. NASA, 22 mai 2015, consulté le 8 janvier 2016 .
- ↑ Le Curiosity Mars Rover de la NASA étudie la zone de contact de la couche rocheuse. NASA, 1er juillet 2015, consulté le 8 janvier 2016 .
- ↑ Le Curiosity Rover de la NASA inspecte un substrat rocheux inhabituel. NASA, 23 juillet 2015, consulté le 10 janvier 2016 .
- ↑ Le rover de la NASA sur Mars avance après les études du « Marias Pass ». NASA, 19 août 2015, consulté le 10 janvier 2016 .
- ^ Le trou de forage et l'emplacement de Curiosity sont parfaits. NASA, 2 septembre 2015, consulté le 10 janvier 2016 .
- ↑ L'équipe Curiosity Rover de la NASA confirme d'anciens lacs sur Mars. NASA, 3 octobre 2015, consulté le 10 janvier 2016 .
- ↑ La mise à niveau aide la NASA à étudier les veines minérales sur Mars. NASA, 11 novembre 2015, consulté le 10 janvier 2016 .
- ↑ Curiosity Mars Rover de la NASA se dirige vers des dunes actives. NASA, 17 novembre 2015, consulté le 11 janvier 2016 .
- ↑ Sandy Selfie Envoyé de la NASA Mars Rover. NASA, 29 janvier 2016, consulté le 11 février 2016 .
- ↑ Tony Greicius : Curiosity Mars Rover reprend ses opérations complètes. 5 juillet 2016, consulté le 9 juin 2020 .
- ↑ Tony Greicius : NASA Mars Rover peut choisir ses propres cibles laser. 20 juillet 2016, consulté le 9 juin 2020 .
- ↑ Tony Greicius : Full-Circle Vista de la NASA Mars Rover Curiosity montre « Murray Buttes ». 17 août 2016, consulté le 9 juin 2020 .
- ↑ Tony Greicius : NASA Rover Game sorti pour l'anniversaire de Curiosity. 3 août 2016, consulté le 9 juin 2020 .
- ↑ Tony Greicius : Mars Rover observe des formations rocheuses en couches spectaculaires. 9 septembre 2016, consulté le 13 juin 2020 .
- ↑ Tony Greicius : Le Curiosity Rover de la NASA commence le prochain chapitre sur Mars. 3 octobre 2016, consulté le 25 juillet 2020 .
- ↑ Martin Perez : Curiosity Mars Rover vérifie une météorite de fer étrange. 2 novembre 2016, consulté le 2 août 2020 .
- ↑ Tony Greicius : L'équipe Curiosity Rover examine une nouvelle interruption de l'exercice . 5 décembre 2016, consulté le 9 août 2020 .
- ↑ Martin Perez : Mars Rover Curiosity examine de possibles fissures dans la boue. 17 janvier 2017, consulté le 28 août 2020 .
- ↑ Tony Greicius : Ruptures observées dans les bandes de roulement des roues Rover. 21 mars 2017, consulté le 6 septembre 2020 .
- ↑ Tony Greicius : le rover de la NASA échantillonne une dune linéaire active sur Mars. 4 mai 2017, consulté le 24 septembre 2020 .
- ↑ Martin Perez: Curiosity Peels Back Layers sur l'ancien lac martien. 1er juin 2017, consulté le 1er novembre 2020 .
- ↑ Tony Greicius : La NASA trouve des preuves de divers environnements dans des échantillons de curiosité. 9 juin 2017, consulté le 22 août 2021 .
- ↑ Où est la curiosité? NASA, 11 janvier 2016, consulté le 11 janvier 2016 .
- ↑ a b Send Your Name to Mars ( Memento du 29 février 2016 dans Internet Archive )
- ↑ Send Your Name to Mars - World Participation Map ( Memento du 26 septembre 2018 dans Internet Archive )
- ↑ NASA : PIA05016 : Étudiants, Public Connect with Mars. 8 janvier 2004, consulté le 4 août 2015 .

Sondes spatiales « Mars » (1960-1973) | Marin 3, 4, 6-9 (1964-1971) | Zone 2 (1964) | Viking 1,2 (1975) | Fobos 1,2 (1988) | Observateur de Mars (1993) | Arpenteur mondial de Mars (1996) | Mars 96 (1996) | Mars Pathfinder avec Sojourner (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander avec Deep Space 2 (1999) | 2001 Mars Odyssée (2001) | Mars Express avec Beagle 2 (2003) | Mars Exploration Rover avec Spirit (2003) et Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phénix (2007) | Phobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosité (2011) | Mission de l'orbiteur de Mars (2013) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | Schiaparelli (2016) | InSight (2018) | al-Amal (2020) | Tianwen-1 avec Zhurong (2020) | Persévérance avec ingéniosité (2020)
Missions prévues
ExoMars Rover (2022) |
Exploration des lunes martiennes (2024)
Les missions en italique sont actives.
Missions annulées : Mars Surveyor 2001 | Mars Télécommunications Orbiter | Mars Science and Telecommunications Orbiter | P5A | Dragon Rouge
( Voir aussi : Liste des objets artificiels sur Mars | Chronologie des missions martiennes )